文章目录
前言
2.1 电池设置
2.2 电机设置
2.3 PID控制器初始设置
前言
以下参数应根据你的飞机的规格正确设置。每一个都会影响调优过程的质量。
2.1 电池设置
确保你的 VTOL 电机的推力曲线尽可能的线性是非常重要的。一个线性的推力曲线意味着电机产生的实际推力的变化与 ArduPilot 所要求的推力成正比。如果你的推力曲线是严重的非线性,那么你将永远不会产生一个好的调优,在某些情况下,可能最终会产生一个坏的调优,你的飞行器可能会变得完全不稳定和崩溃。
导致非线性推力曲线的常见原因有 3 个:
- 随着油门的增加,电压疲沓;
- 在你使用的 PWM 范围内对你的电调进行不正确的端点设置(见下面的"电机设置");
- 你的螺旋桨、电调和电机组合产生的推力的非线性问题。
从设置电压范围开始,以应对电压疲沓。参数用于线性化你的电机推力曲线。
- MOT_BAT_VOLT_MAX:4.2v x 电池数量;
- MOT_BAT_VOLT_MIN:3.3v x 电池数量。
接下来设置推力表。如果你正在设置一个专业的飞机,那么你应该投资一个推力架,这样你就可以在改变油门时准确地测量你的电机/ESC/螺旋桨组合的真实推力。然后,你将随着端点(由下面的电机设置给出)调整 expo 值,使端点之间的推力尽可能的线性。不要相信制造商的推力曲线数据,因为它们经常是不准确的。有关推力比例的细节,请参见电机推力比例(Motor Thrust Scaling)。
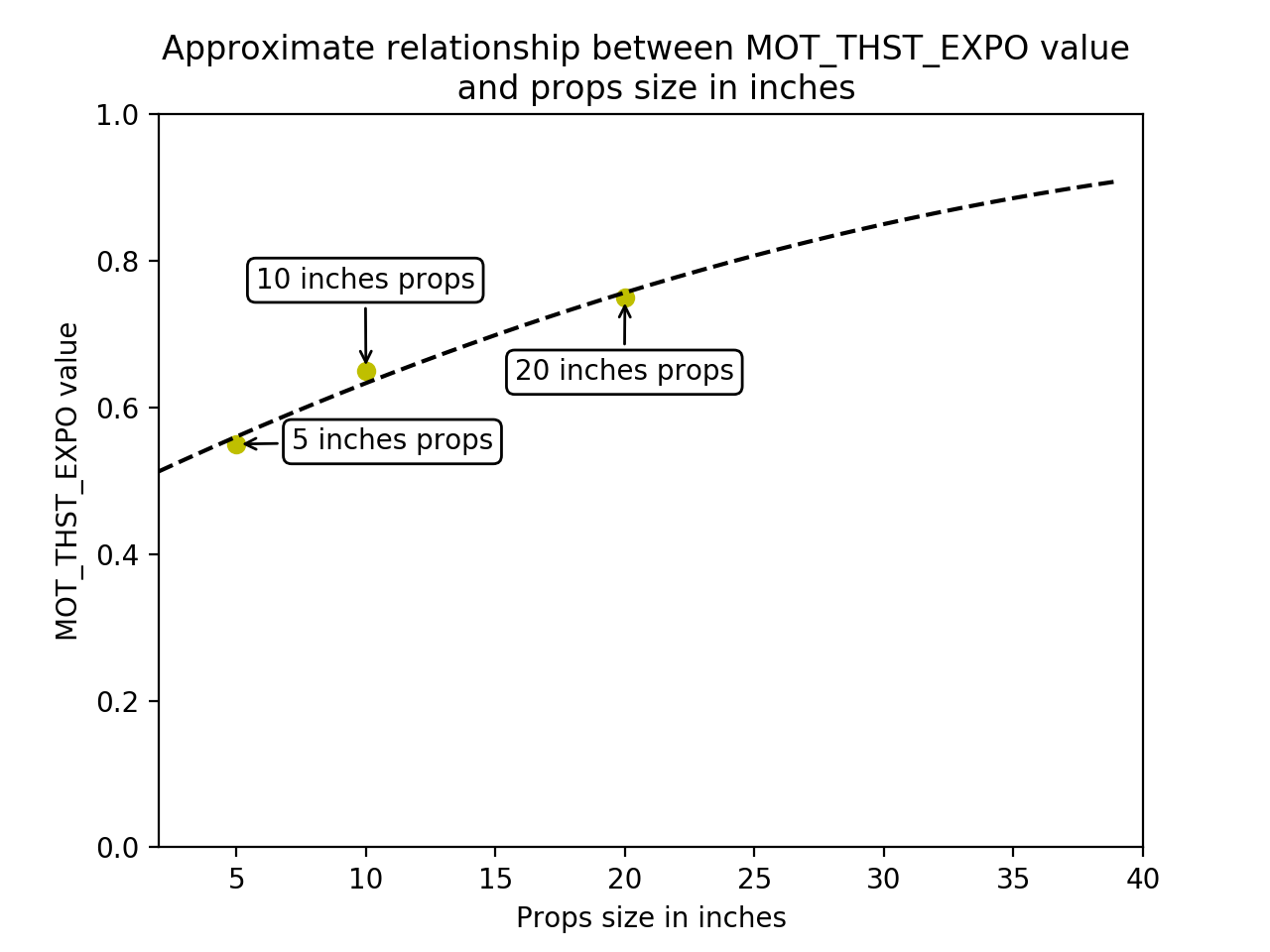
如果你正在设置一个爱好级的飞行器,那么你可以使用下面的图表来估算你飞机的正确 MOT_THST_EXPO 值。
MOT_THST_EXPO:5英寸螺旋桨为 0.55,10英寸螺旋桨为 0.65,20英寸螺旋桨(或更大)为 0.75。这个参数应通过推力架测量得出,以获得最佳效果(不要相信制造商的数据)。
2.2 电机设置
电机参数定义了发送给电调的 PWM 输出范围。这对于确保飞行中使用的整个油门值范围在你的推进系统的线性范围内是至关重要的。
用于定义发送至 ESC 的输出范围的参数。
- MOT_PWM_MAX:查看 ESC 手册,了解固定范围或 2000us;
- MOT_PWM_MIN:查看 ESC 手册,了解固定范围或 1000us;
- MOT_SPIN_ARM:使用电机测试功能(motor test feature)来确定一个值,它可以可靠地启动电机以低转速旋转,作为解锁状态的指示;
- MOT_SPIN_MAX:0.95;
- MOT_SPIN_MIN:使用电机测试功能(motor test feature)和电机测试数据,如果有的话,来设置线性推力的较低范围。默认值通常对业余用途来说是足够的;
- MOT_THST_HOVER:0.25 或低于预期的实际悬停推力百分比(更低是安全的)。
2.3 PID控制器初始设置
下面的设置是为了使你的 PID 控制器的加速度和滤波器设置进入正确的近似范围,以适应你的飞行器。这些参数对调优过程至关重要。PID 控制器的轴 P/D/I 值的默认值对于大多数飞行器的第一次测试悬停来说通常是安全的。
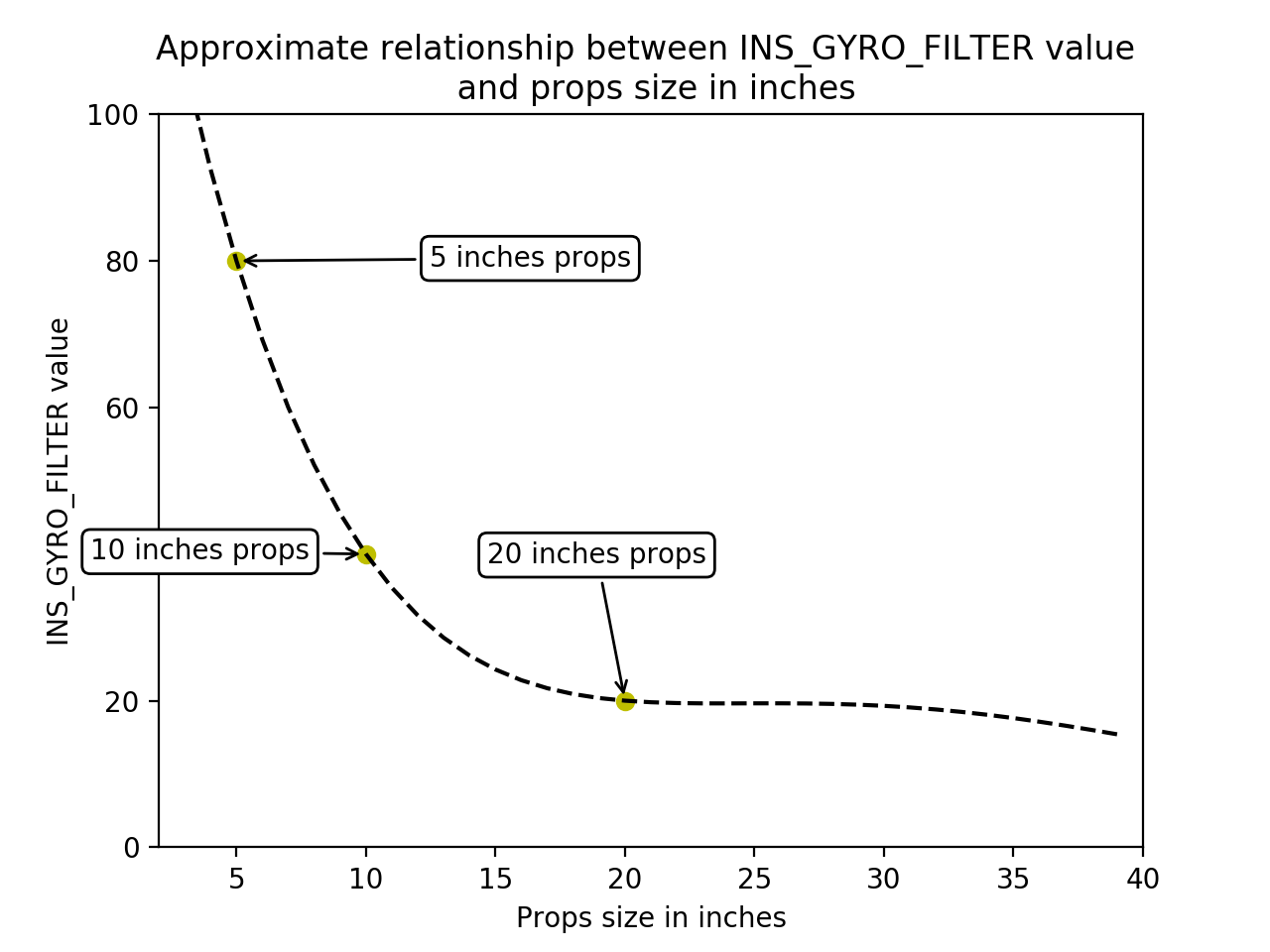
- INS_ACCEL_FILTER:10Hz;
- INS_GYRO_FILTER:5英寸螺旋桨的 80Hz,10英寸螺旋桨的 40Hz,20英寸螺旋桨的 20Hz(或更大);
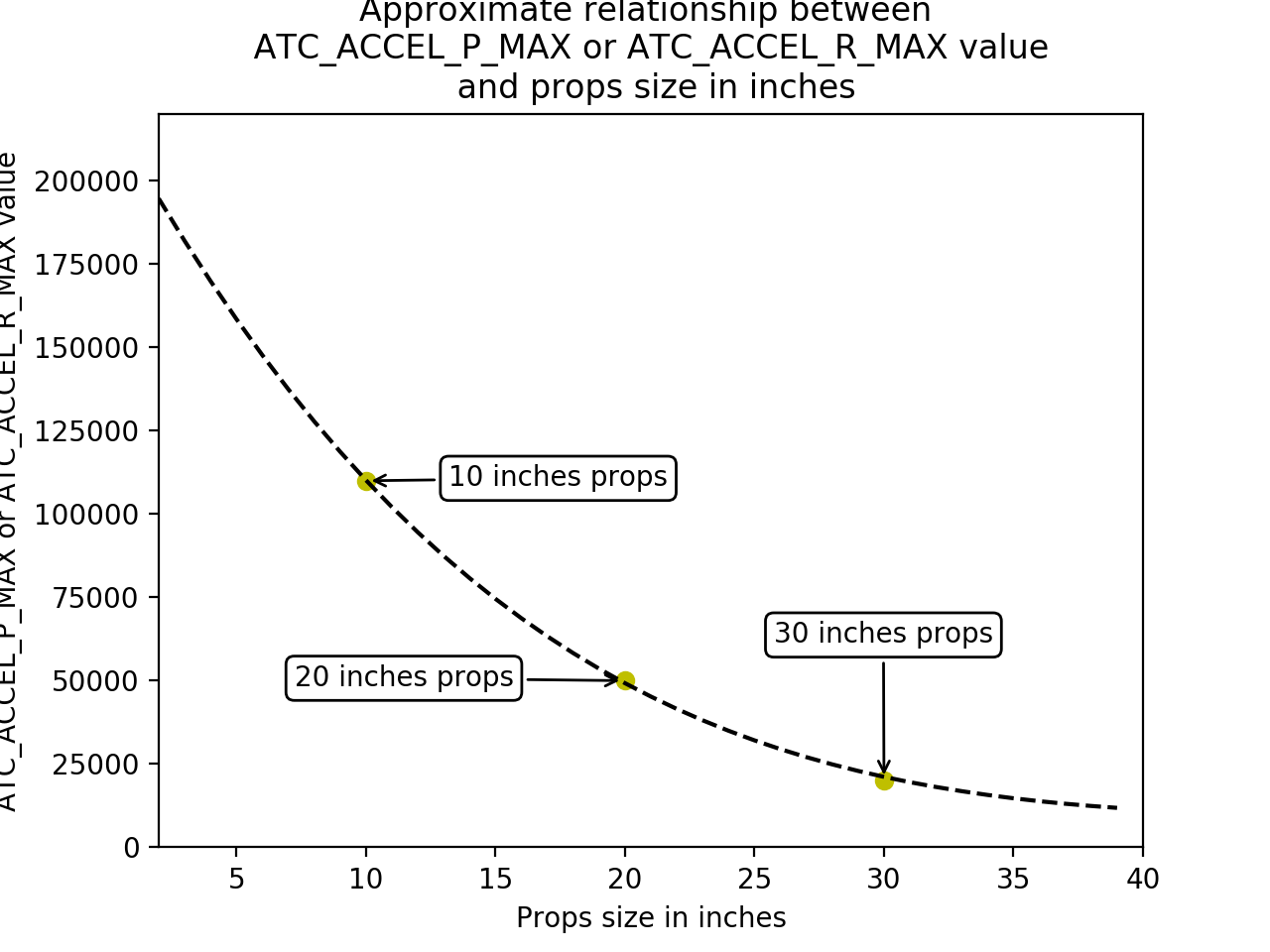
- ATC_ACCEL_P_MAX:10英寸螺旋桨为 110000,20英寸螺旋桨为 50000,30英寸螺旋桨为 20000;
- ATC_ACCEL_R_MAX:10英寸螺旋桨为 110000,20英寸螺旋桨为 50000,30英寸螺旋桨为 20000;
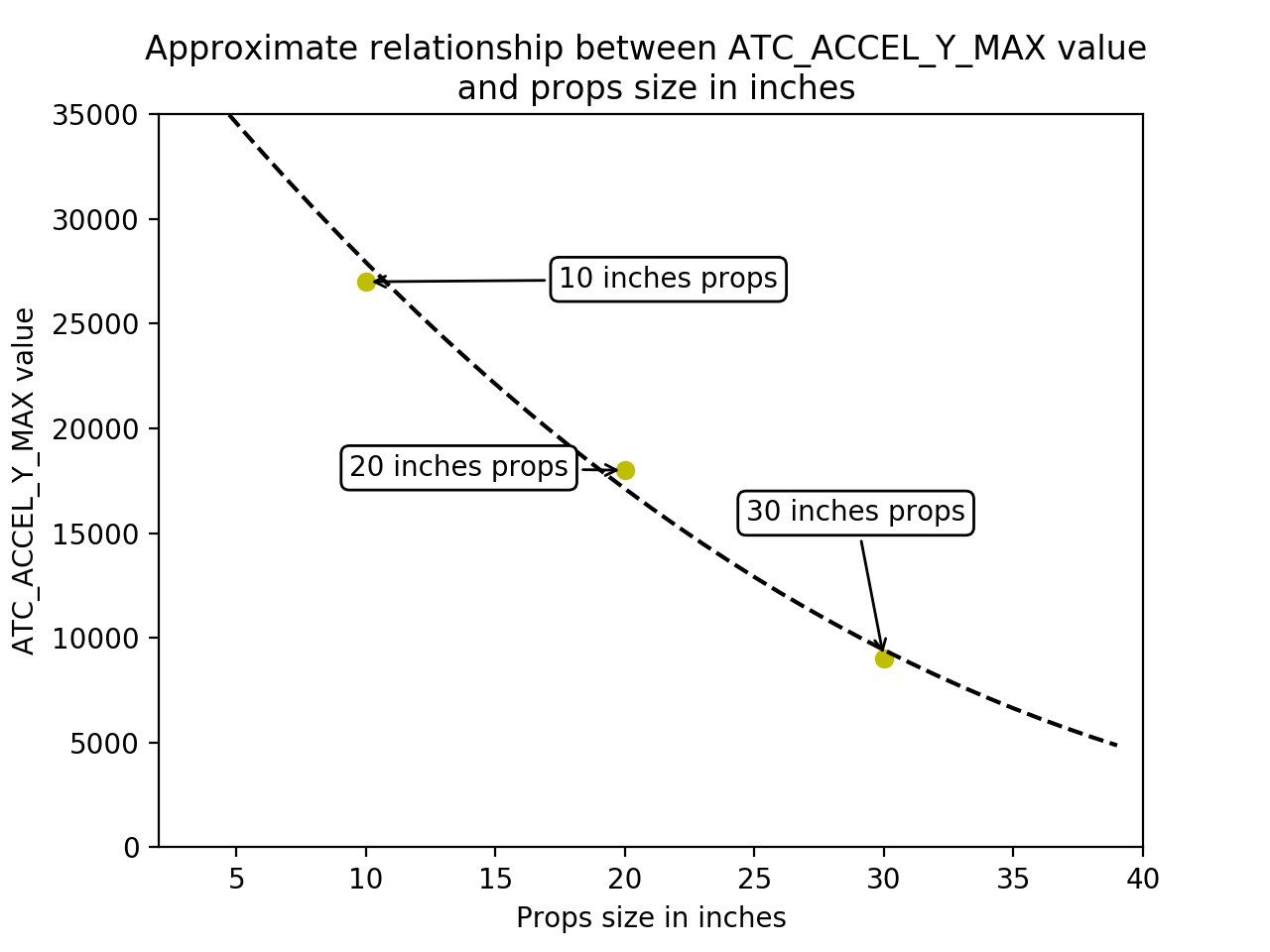
- ATC_ACCEL_Y_MAX:10英寸螺旋桨 27000,20英寸螺旋桨 18000,30英寸螺旋桨 9000。
对于 Copter-4.1(及以后的版本):
- ATC_RAT_PIT_FLTD:INS_GYRO_FILTER / 2;
- ATC_RAT_PIT_FLTT:INS_GYRO_FILTER / 2;
- ATC_RAT_RLL_FLTD:INS_GYRO_FILTER / 2;
- ATC_RAT_RLL_FLTT:INS_GYRO_FILTER / 2;
- ATC_RAT_YAW_FLTE:2;
- ATC_RAT_YAW_FLTT:INS_GYRO_FILTER / 2。