文章目录
前言
1 调优过程说明
2 设置飞机进行调优
3 任务规划器助手
4 初始调优飞行
5 评估飞机的调优
6 手动调优
7 自动调优
8 输入整形
9 基于发射器的调优
10 配置Notch滤波器
11 配置飞行中的FFT
前言
在默认的 PID 设置下,ArduPilot 可以在开箱后安全地飞行大多数遥控飞行器。要想飞得好,在风中有严密的导航和可靠的性能,你要调整你的自动驾驶仪参数。下面的主题告诉你如何做。
- Tuning Process Instructions
- Setting the Aircraft Up for Tuning
- Mission Planner Helper
- Initial Tuning Flight
- Evaluating the Tune
- Manual Tuning
- AUTOTUNE
- Input Shaping
- Transmitter Based Tuning
- Configuring Notch Filtering
- Configuring In-Flight FFT
1 调优过程说明
调优过程包括以下步骤:
1. 设置参数,为第一次调优飞行做准备(Setting up the parameters to prepare for the first tuning flights)。
2. 初始调优飞行(Initial tuning flight),以获得一个稳定的,但不一定是优化的调优。
3. 对最初的稳定调优进行评估(Evaluation of the initial stable tuning)。
4. 横滚和俯仰的手动调优(Manual tuning of Roll and Pitch)。
5. 自动调优(AUTOTUNE)。
6. 设置输入整形(Input Shaping)参数以获得理想的"感觉"。
飞机的初始调优应该在飞机最敏捷的配置下进行。这通常意味着飞机将在电池充满电的情况下达到最小起飞重量。
1.1 高级调优
ArduCopter 有一个非常灵活的控制器设计,在 100g 到 500kg 的飞机上使用,效果很好。有一些困难的控制问题,提供了更深入的理解,这里可以提供。其中一些问题包括:
- 陀螺仪噪音水平高;
- 灵活的机身;
- 软减震器;
- 灵活或松散支架上的大型有效载荷;
- 速率有限的执行器;
- 非线性执行器;
- 极具侵略性或动态飞行。
2 设置飞机进行调优
篇幅过多,另起一篇介绍:
(2)设置飞机进行调优_EmotionFlying的博客-CSDN博客
3 任务规划器助手
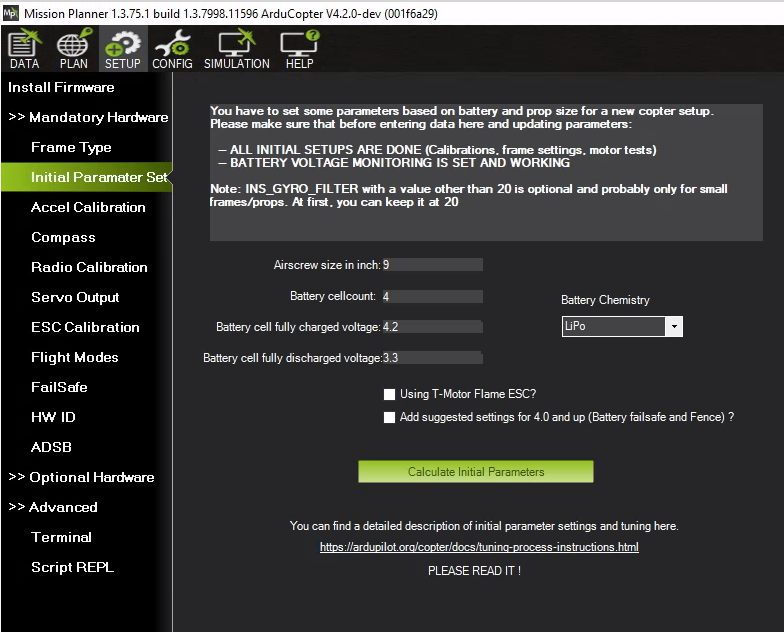
在任务规划器中,在 SETUP/Mandatory Hardware/Initial Parameter Setup 下提供了一个选项卡,以方便设置上述参数。
4 初始调优飞行
篇幅过多,另起一篇介绍:
5 评估飞机的调优
一旦飞机能够在 AltHold 中安全盘旋,大多数飞行员会希望尽快进入自动调优状态。在运行自动调优之前,飞行员应该确保当前的调优足够好,能够从自动调优的反复测试中恢复。要测试当前的调优状态:
1. 在 AltHold 或 STABILIZE 中起飞。
2. 应用小的横滚和俯仰输入。从 5 度的输入开始,释放摇杆到中心,俯仰,左,右,向前滚动,然后是对角线上的所有 4 个点。
3. 逐渐增加输入,使摇杆完全偏移。
4. 转到摇杆完全偏移,让摇杆弹回中央。
如果飞机开始明显过冲或在操纵杆输入后出现震荡,在情况开始危及飞机之前停止测试。在运行自动调优之前,飞机可能需要进行手动调优(见下一节)(see next section)。
为了测试独立于输入整形的稳定环路,设置参数:
ATC_RATE_FF_ENAB 为 0。
1. 在 AltHold 或 STABILIZE 中起飞。
2. 保持横滚或俯仰输入。
3. 松开操纵杆,观察飞机平飞时的过冲情况。
4. 逐渐增加摇杆的偏移到 100%。
如果飞机明显过冲,或飞机振荡,则停止测试,在运行自动调优之前,飞机可能需要进行手动调优(见下一节)(see next section)。
测试完成后将 ATC_RATE_FF_ENAB 设置为 1。
6 手动调优
篇幅过多,另起一篇介绍:
(6)手动调优_EmotionFlying的博客-CSDN博客
7 自动调优
篇幅过多,另起一篇介绍:
8 输入整形
篇幅过多,另起一篇介绍:
(8)输入整形_EmotionFlying的博客-CSDN博客
9 基于发射器的调优
篇幅过多,另起一篇介绍:
10 配置Notch滤波器
篇幅过多,另起一篇介绍:
11 配置飞行中的FFT
篇幅过多,另起一篇介绍: