文章目录
前言
1 概述
2 连接无线电台
3 参数说明
前言
本文介绍了如何将 3DR Radio v1 连接到飞行控制器。你还应阅读 SiK Radio v2,其中包含更详细的用户指南和功能列表。

1 概述
3DR 无线电设备是在自动驾驶仪和地面站之间建立遥测连接的最简单方法。
3DR 无线电设备有两个版本(版本 2 较新,见上面的链接)。这两个无线电设备的外形和连接方式略有不同(第 2 版配有内置 FTDI 调试线),但在其他方面的表现非常相似。

本文只介绍两种无线电设备的主要区别--连接无线电设备。
2 连接无线电台
3DR 无线电 v1 有用于空中和地面的不同无线电模块:
"地面"模块有一个 USB 接口,便于直接连接到地面站。在 Windows 7 或更高版本的计算机上,第一次插入接地模块时会自动安装所需的驱动程序,但如果由于某种原因没有安装,或者地面计算机运行的是 Windows XP(或更早版本),则可从此处(here)获取 D2XX FTDI 驱动程序。
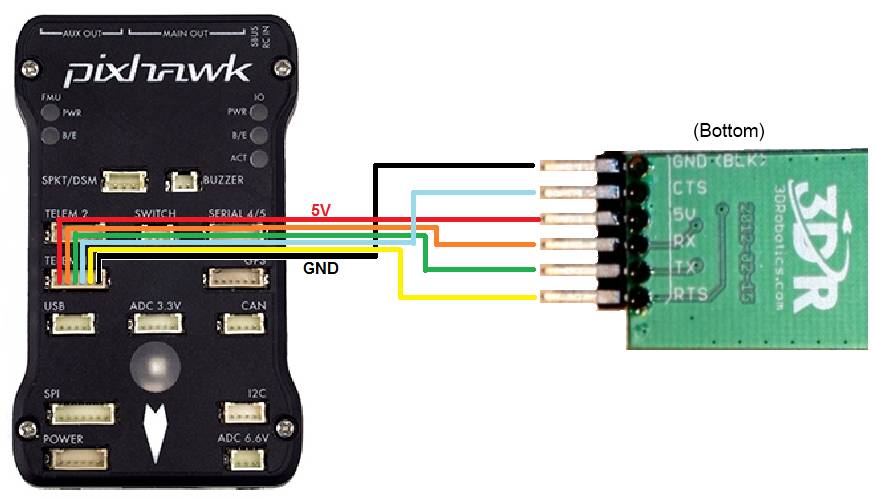
"飞机"模块有一个 FTDI 六针针座,可直接连接到自动驾驶仪的遥测端口,如下文所示。
连接到自动驾驶仪
飞机模块需要连接到自动驾驶仪的串行端口,有时标记为 TELEM1 或 TELEM2。无线电的 TX 和 RX 引脚与串行端口的 RX 和 TX 信号相连。如果串行端口有 CTS 和 RTS 引脚,则连接这两个引脚可在较远距离上提供流量控制并提高可靠性。模块所连接的 UART端口的 SERIALx_PROTOCOL 应设置为"2"(MAVLink2)。确保无线电已使用最新固件编程,以便与 MAVLink2 协议正常工作。请参阅下面的编程部分。
更改无线电配置
通常不需要这样做,但如果需要,请参见:使用任务规划器配置遥测无线电设备(Configuring a Telemetry Radio using Mission Planner)。
更新固件
使用 Mission Planner,将模块连接到自动驾驶仪供电,并将底座 USB 装置插入计算机:
- 确定基本无线电使用的 USB COM 端口,并将其与波特率(无线电默认为 57600)一起输入 Mission Planner 的端口选择框;
- 在 Mission Planner 中不连接任何东西的情况下,使用设置/可选硬件/Sik 无线电工具选项卡 "上传固件(本地)",这将下载最新固件并将其写入无线电;
- 现在,你可以通过 MAVLink 使用无线电链路与 Mission Planner 的基地无线电通信端口进行连接;
- 如果出现任何问题,请确保自动驾驶仪与无线电连接的 SERIAL 端口设置为波特率(默认为 57600),且协议为 MAVLink2("2")。
3 参数说明
1、SERIAL2_PROTOCOL:串行2协议选择
注意:更改后需要重新启动。
控制 Serial2 端口应使用何种协议。请注意,Frsky 选项需要外部转换器硬件。详情请查看维基百科。
| Values | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|