文章目录
前言
1 监控链接质量
2 诊断范围问题
3 MAVLink协议说明

前言
本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。
!Tip
大多数用户只需要 SiK Radio v2 中提供的基本指南和功能概述。

1 监控链接质量
如果地面站支持 MAVLink,你可以使用 SiK 遥测无线电中的 MAVLink 支持功能在飞行时监控链路质量。
两个关键的信息参数是 RADIO.rssi 和 RADIO.remrssi。第一个参数是本地无线电正在接收的 RSSI(信号强度)级别。remrssi 参数是远程无线电正在接收的 RSSI。
下面是我在当地飞行场飞行时 RSSI 水平的典型示意图。
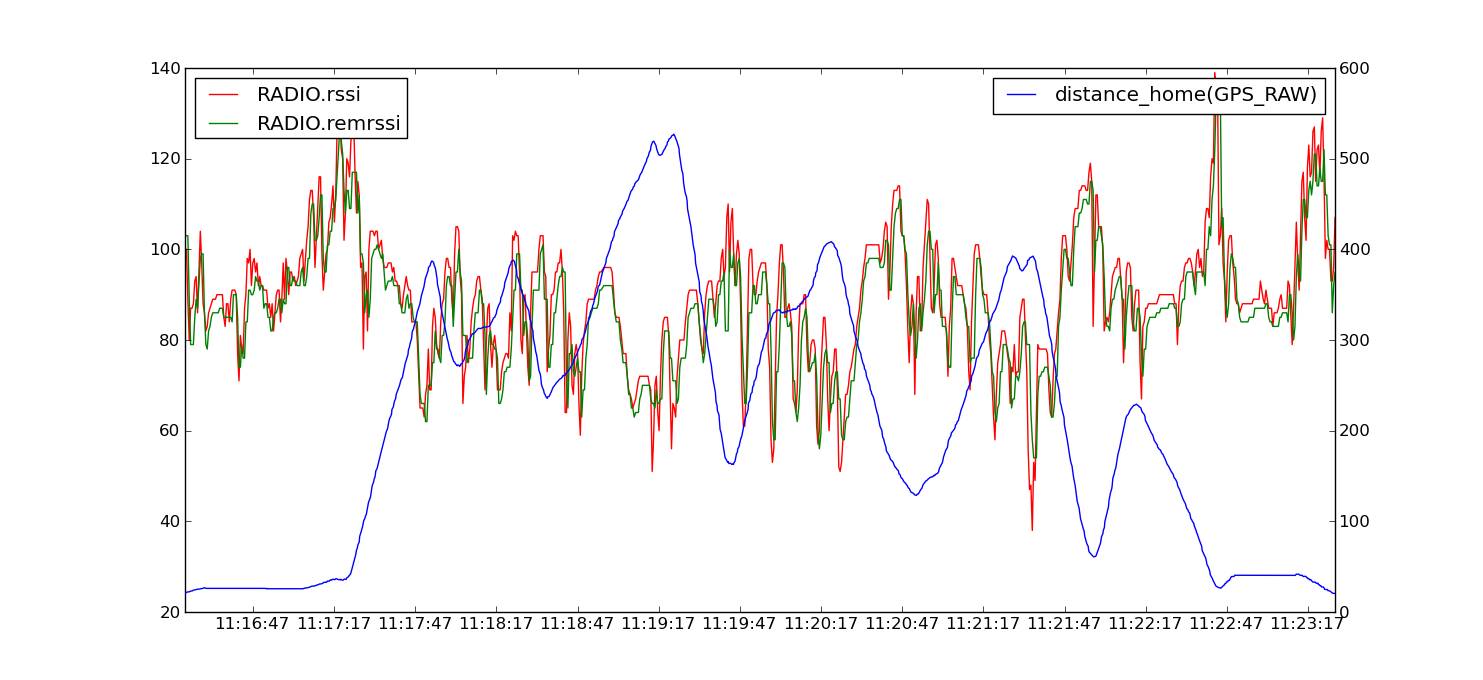
RSSI 值的比例约为 1.9x dBm 信号强度加上一个偏移量。有关 RSSI 和接收信号强度 dBm 之间的精确映射,请参阅 Si1000 数据表,或使用以下近似公式。
signal_dBm = (RSSI / 1.9) - 127
!Note
这次飞行中 RSSI 变化如此之大的原因是,由于我在飞机上使用的是简单的有线天线,当飞机转弯时信号会衰减。这次飞行的 RSSI 值足够高,在使用默认无线电参数的情况下,整个飞行过程中的链路质量都非常好。
2 诊断范围问题
如果从上述信息中得到的范围小于你的预期,那么你需要做的就是绘制一次飞行的噪声和信号电平图,以找出问题所在。
范围问题最常见的来源是噪音。噪声是在无线电使用的相同频率范围内产生的不必要的无线电辐射,会干扰无线电的工作。无线电内置遥测记录功能,可帮助你诊断噪声源。
有三种主要类型的噪声可能会影响无线电:
- 飞机电子设备(如发动机、电调、自动驾驶仪等)产生的噪音;
- 地面站电脑,尤其是 USB 总线发出的噪音;
- 附近其他人操作与你的无线电频率相同的无线电所产生的噪音。
要确定噪音的类型,请打开任务计划器,选择"遥测日志"选项卡。然后选择 Tlog> Kml 或 Graph。弹出窗口后选择"Graph Log(图表日志)",然后选择使用无线电进行试飞的日志。等待日志加载,然后选择以下项目进行记录:
- rssi
- remrssi
- noise
- remnoise
将所有 4 个值放在一张图上。最终会得到这样的图表:
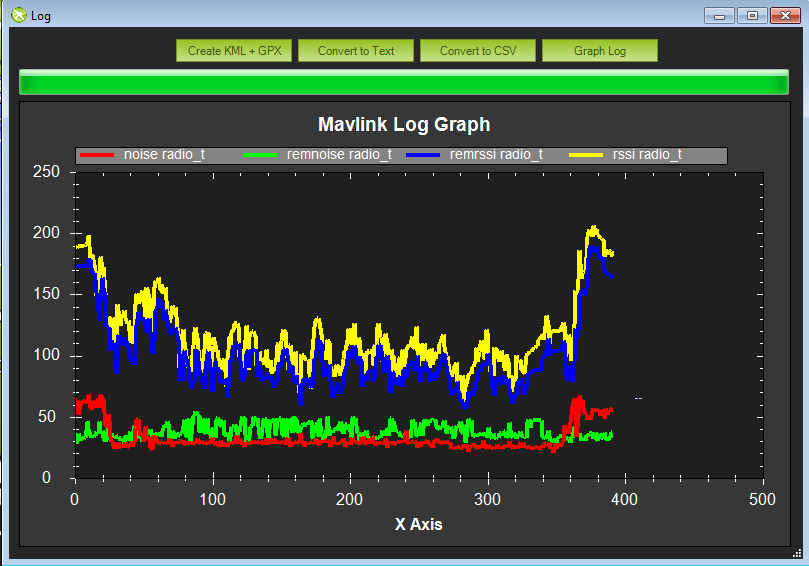
这张图说明了 4 个问题:
- 地面接收到的信号量;
- 飞机内接收到的信号量;
- 地面接收到的噪音量;
- 飞机内接收到的噪音量。
为了获得最佳的通话距离,你希望两条噪声线都较低,而两条信号线都较高。在上图(取自我的 SkyFun 和一对 3DR 433 无线电设备)中,你可以看到飞机上的噪音水平高于地面上的噪音水平。另外请注意,在飞行开始时(在我启动发动机之前),飞机上的噪音水平较低,而在我启动发动机之后,噪音水平有所上升。这说明我的发动机产生了一些噪音。如果我想获得更大的航程,就需要将无线电进一步远离马达和电调。
3DR-433 最常见的噪声源可能是地面站 USB 总线产生的噪声。这表现为 RADIO.noise 值偏高。如果出现这种情况,可以尝试使用不同的 USB 调试线或不同的笔记本电脑。你也可以尝试在笔记本电脑和无线电之间使用 USB 集线器。
如果"rssi"和"噪音"在图表上相等,那么就会失去链接。要确定你的范围,一个粗略的经验法则是减去"rssi"和"噪音"的数字,然后除以 2。衰减余量每增加 6 分贝,音量范围就会增加一倍。因此,如果你有 18 分贝的衰减余量,那么无论你测量余量时的音量是多少,你的音量大约都能达到 8 倍。
天线位置是造成距离问题的另一个关键因素。地面站天线应远离障碍物,离地几米远。你可能需要搭建一个支架来固定天线,以获得最佳的覆盖范围。
3 MAVLink协议说明

MAVLink 是一种非常轻量级的消息传输协议, 用于地面控制终端(地面站)与无人机之间 (以及机载无人机组件之间) 进行通信。
Mavlink 遵循现代混合发布-订阅和点对点设计模式:数据流作为 topics 发送/发布的, 而配置子协议 (如 路径点协议 或 参数协议)是基于重传机制的点对点模式。
消息内容定义于与之关联的xml 文件中。 每个 xml 文件对应一个特定的 MAVLink 系统,并为该系统定义了专属的消息集(亦被称之为“语支dialect”)。 大部分 地面站和自动驾驶仪所采用的“通用消息集”定义于 common.xml 中 (大多数“语支”均是基于“通用消息集“构建 的:即,大多数“语支”所对应的 xml 文件里,均包含了 common.xml) 。
!Note
基于C封装的 MAVLink 库,是一个 header-only 库, 其针对资源受限系统有限的 ram 和闪存,进行了高度优化。 这种库,已经过现场验证, 并部署在许多产品中, 充当不同厂家组件之间的交互性接口。
MAVLink 于2009年初由 Lorenz Meier 首次发布, 目前为止,已拥有数量可观的贡献者。