详情可参见:OriginBot智能机器人开源套件——支持ROS2/TogetherROS,算力强劲,配套古月居定制课程 (guyuehome.com)
OriginBot智能机器人开源套件
最新消息:OriginBot V2.1.0版本正式发布,新增车牌识别,点击查看
OriginBot
OriginBot是一款智能机器人开源套件,更是一个社区共建的开源项目,旨在让每一位参与者享受机器人开发的乐趣。
开源共建
“开源就是力量”——这是OriginBot的核心精神,欢迎每一位开发者参与其中。
▶ 开源生态
持续迭代 ◀
全栈开发
智能机器人开发之路漫漫修远,OriginBot将陪伴每一位开发者上下求索。
▶ 全技术栈
内容齐全 ◀

智能应用
OriginBot结构简约,应用却不简单,可以拓展无限可能。
▶ 算力强劲
应用丰富 ◀

源于热爱
每位机器人开发者都曾有“从零开发一款机器人”的梦想,OriginBot源于这一份最初的热爱。
▶ 独一无二
起航开发 ◀
起航机器人开发
配置参数
| 主要配置项 | 导航版 | 视觉版 |
|---|---|---|
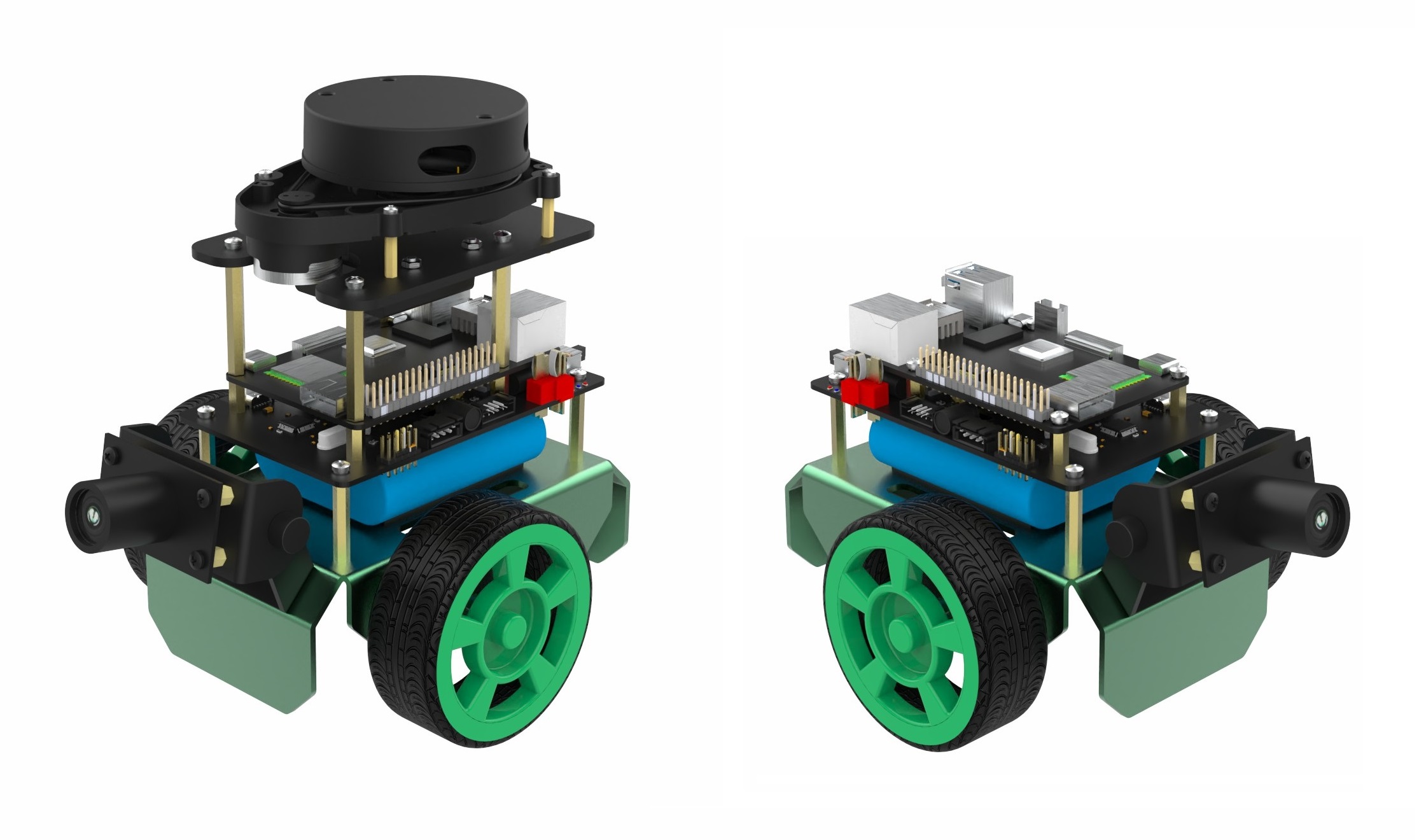
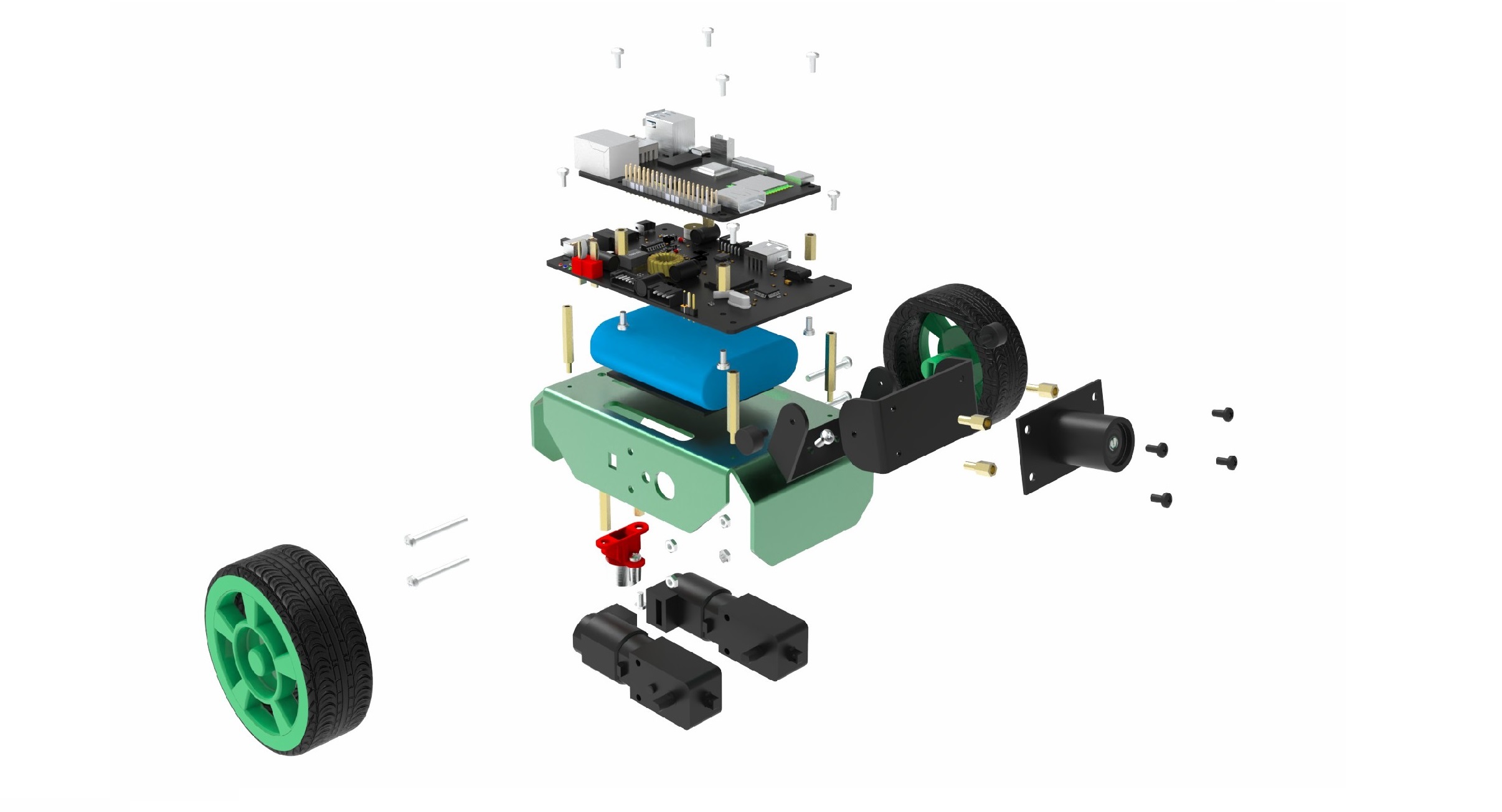
| 效果图 |
|
|
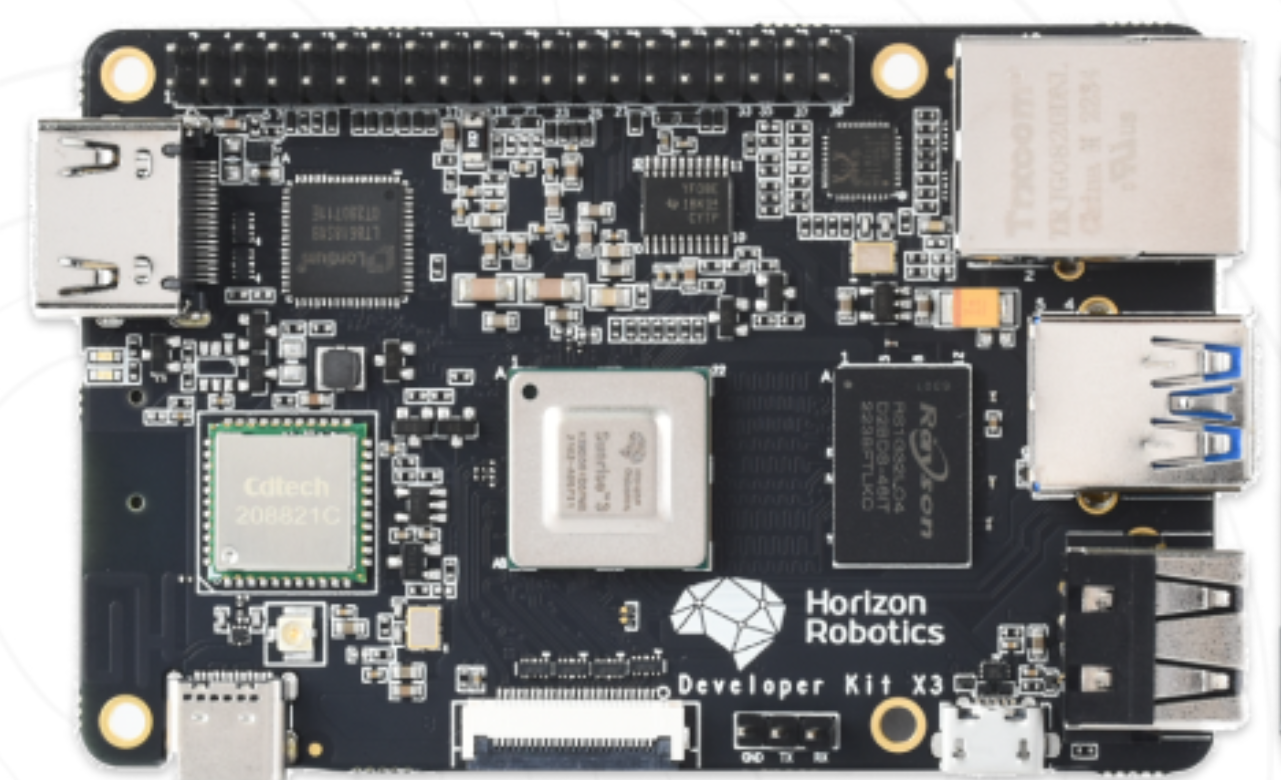
| 应用处理器 | RDK X3 CPU:四核ARM Cortex-A53@1.5GHz BPU:双核@1GHz,等效算力5TOPS 内存:4GB LPDDR4 RAM 存储:32GB(TF卡) | RDK X3 CPU:四核ARM Cortex-A53@1.5GHz BPU:双核@1GHz,等效算力5TOPS 内存:4GB LPDDR4 RAM 存储:32GB(TF卡) |
| 运动控制器 | MCU:STM32F103 Flash容量:64K RAM容量:20KB | MCU:STM32F103 Flash容量:64K RAM容量:20KB |
| 差速底盘 | 带编码器TT电机 * 2 摄像头支架 万向轮及支架 | 带编码器TT电机 * 2 摄像头支架 万向轮及支架 |
| 摄像头 | 400W像素MIPI相机 | 400W像素MIPI相机 |
| 激光雷达 | 5~10Hz扫描频率, 360°扫描角度 2cm绝对误差 | - |
| 姿态传感器 | 加速度、陀螺仪、角度输出 自带卡尔曼滤波 | - |
| 视频课程 | 古月居定制课程 | 古月居定制课程 |
| 电池续航 | 2~4小时 2000 mAh(典型值) 12.6 V 800mA充电器 | 2~4小时 2000 mAh(典型值) 12.6V 800mA充电器 |
| 尺寸 | 长:180 mm 宽:132 mm 高:167 mm(±2) | 长:180 mm 宽:132 mm 高:109 mm(±2) |
| 重量 | 0.78 kg(±0.05) | 0.62 kg(±0.05) |
| 最大速度 | 0.8 m/s(±0.05) | 1.0 m/s(±0.05) |
| 操作软件 | ubuntu 20.04(Server) ROS2 Foxy TogetheROS 2.0.2 | ubuntu 20.04(Server) ROS2 Foxy TogetheROS 2.0.2 |
| 其他配件 | 唯一编号车牌贴纸 雷达贴纸 螺丝、铜柱、线缆、读卡器安装工具等 | 唯一编号车牌贴纸 螺丝、铜柱、线缆、读卡器安装工具等 |
参与贡献
诚挚邀请各位开发者可以参与到OriginBot项目当中来,参与的方式和形式有很多种:
提供反馈
-
在使用OriginBot套件的过程中,如有任何问题或者建议,欢迎在古月居社区版块提问讨论;
-
在使用OriginBot软件的过程中,如有发现任何bug,欢迎在代码仓库中提交Issue;
贡献代码
- 在使用OriginBot套件的过程中,如对原生代码有优化、增加等修改,欢迎在代码仓库中提交Pull Request;
开源传递
-
如果你对OriginBot有兴趣,欢迎点赞该项目的源码仓库,或者分享给身边有需要的开发者;
-
如果基于OriginBot开源项目衍生出更多有意思的功能或者机器人,欢迎在社区板块中与大家分享,优秀的项目我们也会在社区中宣传;
链接汇总
-
社区主站:https://www.originbot.org
-
开源仓库:
| 名称 | 链接 | 说明 |
|---|---|---|
| originbot | originbot: OriginBot智能机器人开源套件 | originbot机器人端功能包仓库 |
| originbot_desktop | originbot_desktop: OriginBot智能机器人开源套件(PC端功能包) | originbot电脑端功能包仓库 |
| originbot_controller | originbot_controller: OriginBot智能机器人开源套件(控制器开源仓库) | originbot控制器源码仓库 |