标注
零基础python教程
批量重命名
杂谈
jstl
旅游
JWT
self-attention
SphereNet
EMC
网站漏洞修复
网赚项目
几何
HAL库
firefox
android布局
java云原生
ERP
reference手册
docker 搭建es7
apollo
2024/4/11 22:38:02
apollo namespace(六)
公共组件的接入和多个AppId使用同一份配置都是使用namespace方法:
Tips:
公共的Namespace的配置能被任何项目读取 通过创建公共Namespace可以实现公共组件的配置,或多个应用共享同一份配置的需求 如果其它应用需要覆盖公共部分的配置,可以在…

基于ros1的 apollo 7.0.0规划控制算法
apollo.ros-7.0.0
上次给大家带来了之前学习apollo时开发的内容apollo.ros-1.0.0和apollo.ros-3.0.0,主要是针对apollo 1.0.0和3.0.0版本进行了ros1下的移植和规划控制算法的学习。本次在之前工作的基础上,针对apollo 7.0.0版本,进行了ros1下…

自动驾驶中的感知模型:实现安全与智能驾驶的关键
自动驾驶中的感知模型:实现安全与智能驾驶的关键 文章目录 引言感知模型的作用感知模型的技术安全与挑战结论 2023星火培训【专项营】Apollo开发者社区布道师倾力打造,包含PnC、新感知等的全新专项课程上线了。理论与实践相结合,全新的PnC培训…
APOLLO自动驾驶技术沙龙:未来已来,共创智能交通新时代
在这次Apollo会议上,我深刻地感受到了人工智能自动驾驶技术领域的最新进展和未来趋势。作为一名从事软件开发工作的人员,我深感荣幸能够参加这次盛会。 前言 本次活动是百度Apollo社区工程师齐聚首钢Park,带来现场实操与技术分享。主要围绕Ap…
【Apollo】开启Apollo之旅:让自动驾驶如此简单
前言
Apollo 是百度公司推出的自动驾驶平台。它是一个综合性的自动驾驶解决方案,提供了包括感知、决策、规划和控制等核心功能,以及地图、定位、仿真、数据管理等配套工具。 文章目录 前言Apollo 的发展历程Apollo 8.0新特性软件包管理感知框架工具链小…

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_SPEED_OPTIMIZER
文章目录 前言PIECEWISE_JERK_SPEED_OPTIMIZER功能简介PIECEWISE_JERK_SPEED_OPTIMIZER相关配置PIECEWISE_JERK_SPEED_OPTIMIZER流程QP问题的标准类型定义:优化变量设计目标函数约束条件相关矩阵二次项系数矩阵 H H H一次项系数向量 q q q设定OSQP求解参数 Process设…

Android引入Apollo(阿波罗)
程序猿日常
记Android项目引入Apollo(阿波罗)上源码
apollo开发分支
应用
Apollo(阿波罗)客户端会管理好应用的后台GraphQL数据
之前网络请求使用RetrofitOkHttp 改成使用ApolloOkHttp
引入
1.对应的module的build.gradle中添加
id("com.apollographql.apollo3&qu…

分布式配置中心Apollo系列--生产环境搭建
一、准备工作
1.1 运行时环境
1.1.1 OS
服务端基于Spring Boot,启动脚本理论上支持所有Linux发行版,建议CentOS 7。
1.1.2 Java
Apollo服务端:1.8Apollo客户端:1.7
1.2 MySQL
版本要求:5.6.5
二、部署步骤
部署…
Apollo安装全攻略
安装方式 概述快速安装安装基础软件安装 Ubuntu Linux安装 Docker Engine 安装 Apollo 环境管理工具获取 GPU 支持(可选)创建和进入 Apollo 环境容器 源码安装安装 Linux 系统(可选)安装 NVIDIA GPU 驱动安装 docker下载并编译 Ap…

百度Apollo(一):代码模块
百度Apollo:https://github.com/ApolloAuto/apollo/tree/master/modules
一级目录结构重要文件夹内容:
docker:docker有关的文件,如启动docker脚本,进入docker容器脚本。docs:文档模块,有完整英文文档和部分中文文档…

【Apollo学习笔记】—— Planning模块
前言 本文记录学习planning模块时的一些笔记,总体流程参照https://zhuanlan.zhihu.com/p/61982682中的流程图,如上图所示。 planning_component
modules/planning/planning_component.cc
PlanningComponent::Init部分首先完成规划模式的选择ÿ…

【Apollo学习笔记】——规划模块TASK之SPEED_BOUNDS_PRIORI_DECIDER
文章目录 前言SPEED_BOUNDS_PRIORI_DECIDER功能简介SPEED_BOUNDS_PRIORI_DECIDER相关配置SPEED_BOUNDS_PRIORI_DECIDER流程将障碍物映射到ST图中ComputeSTBoundary(PathDecision* path_decision)ComputeSTBoundary(Obstacle* obstacle)GetOverlapBoundaryPointsComputeSTBounda…
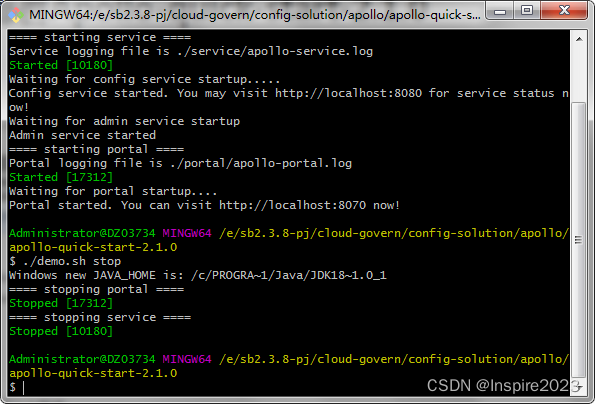
win系统部署Apollo-quick-start-2.1.0
win系统部署Apollo-quick-start-2.1.0
携程Apollo配置中心,官方部署包里提供了2个sql文件,需要刷入数据库。之后修改demo.sh里的数据库配置,最后使用git bash启动demo.sh刷sql脚本
官方部署包里提供了2个sql文件 修改demo.sh文件 使用git bash启动demo…

ros2移植Apollo和autoware规控算法可跑工程
工程详细介绍请看: 自动驾驶路径规划控制ros移植Apollo和autoware规控算法可跑工程(适合入门学习,科研和实战)
ros2的工程版本说明
之所以增加ros2版本,是因为想增加代码的工程应用性,其实对于科研来说并…

自动驾驶:未来的道路上的挑战与机遇
自动驾驶:未来的道路上的挑战与机遇 文章目录 引言安全与道路事故的减少交通拥堵的缓解城市规划的变革技术和法律挑战结语 2023星火培训【专项营】Apollo开发者社区布道师倾力打造,包含PnC、新感知等的全新专项课程上线了。理论与实践相结合,…
携程Apollo配置中心动态生效实现原理(转载)
一、结论:
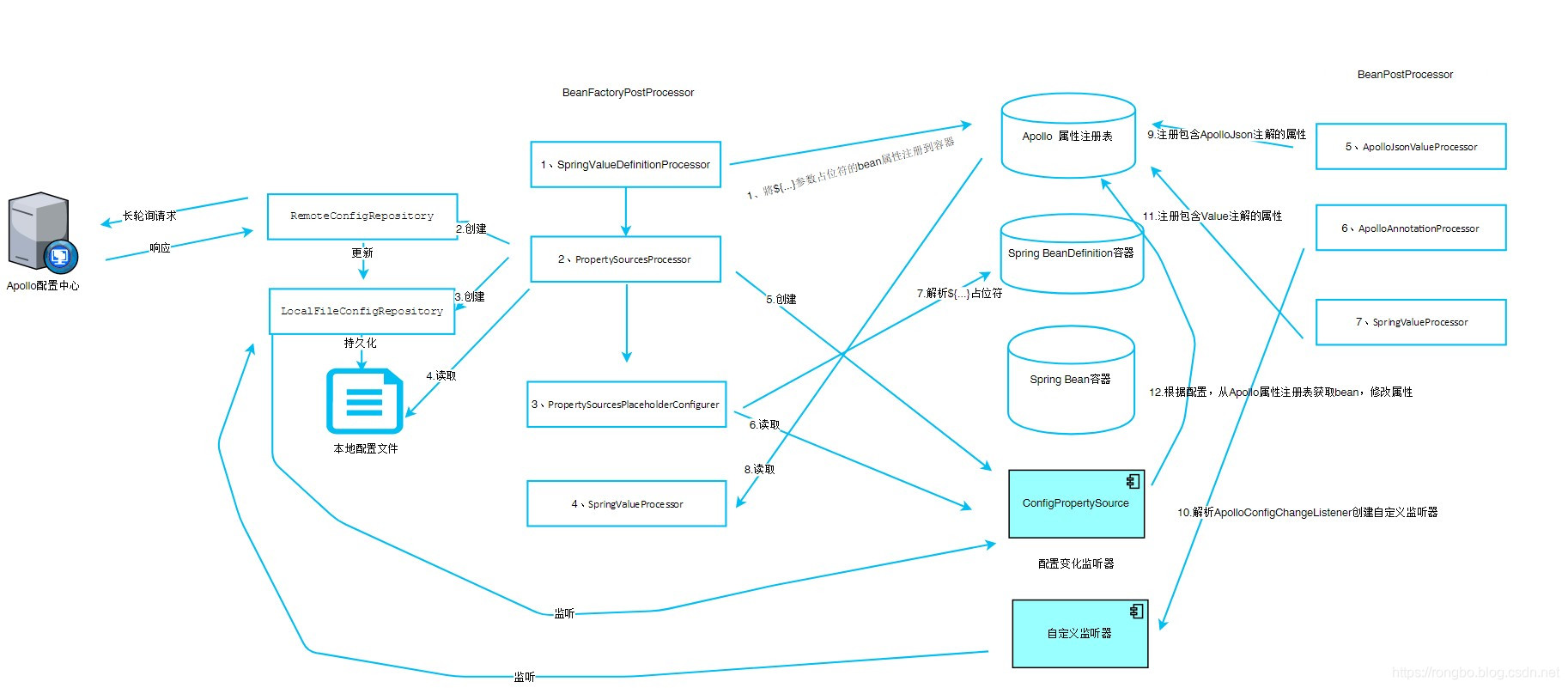
Apollo配置中心动态生效机制,是基于Http长轮询请求和Spring扩展机制实现的,在Spring容器启动过程中,Apollo通过自定义的BeanPostProcessor和BeanFactoryPostProcessor將参数中包含${…}占位符和Value注解的Bean注册到A…


【Apollo】Apollo-ros版本架构学习与源码分析
😏★,:.☆( ̄▽ ̄)/$:.★ 😏 这篇文章主要介绍Apollo-ros版本架构学习与源码分析。 无专精则不能成,无涉猎则不能通。——梁启超 欢迎来到我的博客,一起学习,共同进步。 喜欢的朋友可以关注一下&a…

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER(二)
文章目录 TASK系列解析文章OptimizeByNLP1.get_nlp_info()定义问题规模2.get_bounds_info()定义约束边界约束3.get_starting_point()定义初值4.eval_f()求解目标函数5.eval_grad_f()求解梯度6.eval_g()求解约束函数7.eval_jac_g()求解约束雅可比矩阵8.eval_h()求解黑塞矩阵9. f…

分布式配置中心Apollo教程
分布式配置中心Apollo教程 简介 Apollo配置中心课程是传智燕青老师针对微服务开发设计的系列课程之一,本课程讲解了Apollo分布式系统配置中心的使用方法和工作原理,并从实战出发讲解生产环境下的配置中心的构建方案,从Apollo的应用、原理、项…
Apollo感知模块
Apollo感知模块之软硬件硬件配置软件设计障碍物检测识别红绿灯检测识别车道线检测硬件配置 Apollo感知模块在硬件层面的配置如下:
Lidar: 128 线 LiDAR velodyne 16 线 LiDAR (lidar_front, lidar_rear_left, lidar_rear_right)Radar: radar…

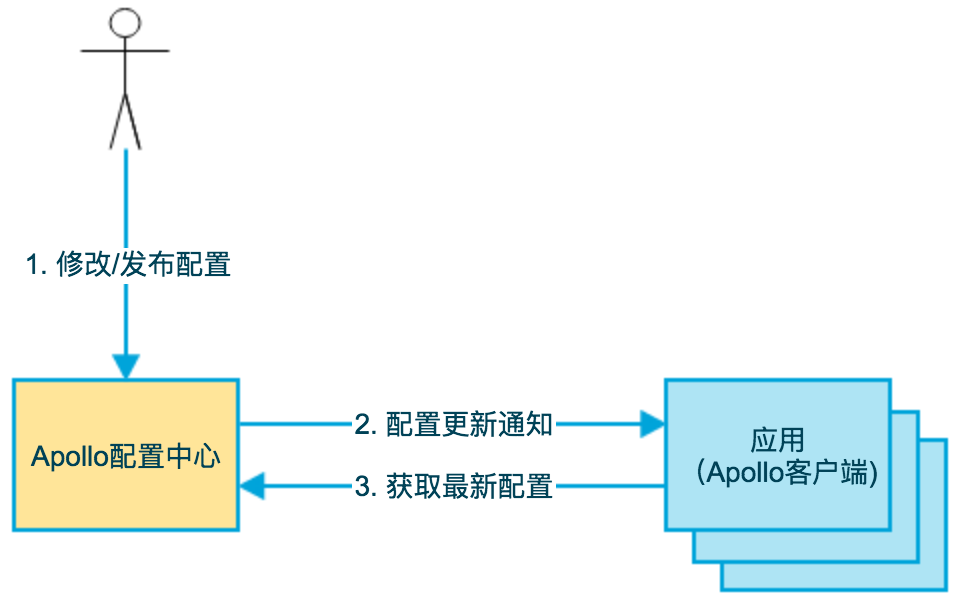
Apollo配置更新通知
文章目录 启用方式hook编写服务部署本地部署容器化部署构建镜像 使用 ⚡️: 应领导要求想要把 Apollo 配置变更信息更新到企业微信群中,线上出现异常可根据变更时间,快速反应是否是配置变更导致异常 启用方式
🌛: 前提有一个可正常使用的Apo…
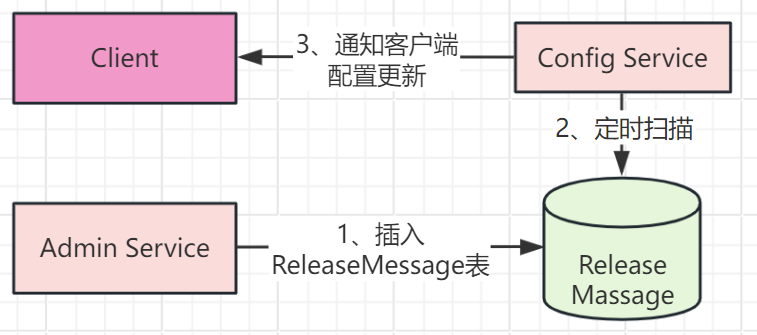
Apollo配置发布原理解析
📫作者简介:小明java问道之路,2022年度博客之星全国TOP3,专注于后端、中间件、计算机底层、架构设计演进与稳定性建设优化,文章内容兼具广度、深度、大厂技术方案,对待技术喜欢推理加验证,就职于…
Apollo2.2.0 arm 达梦 人大金仓 适配
基本思路和我之前改的oracle的类似,这里就不赘述了。
Apollo oracle适配_apollo oracle脚本-CSDN博客
目前实现了kingbase8 pgsql兼容模式下适配。达梦 mysql兼容模式下的适配,兼容arm的国产处理器,直接上git链接,有问题私。不同…
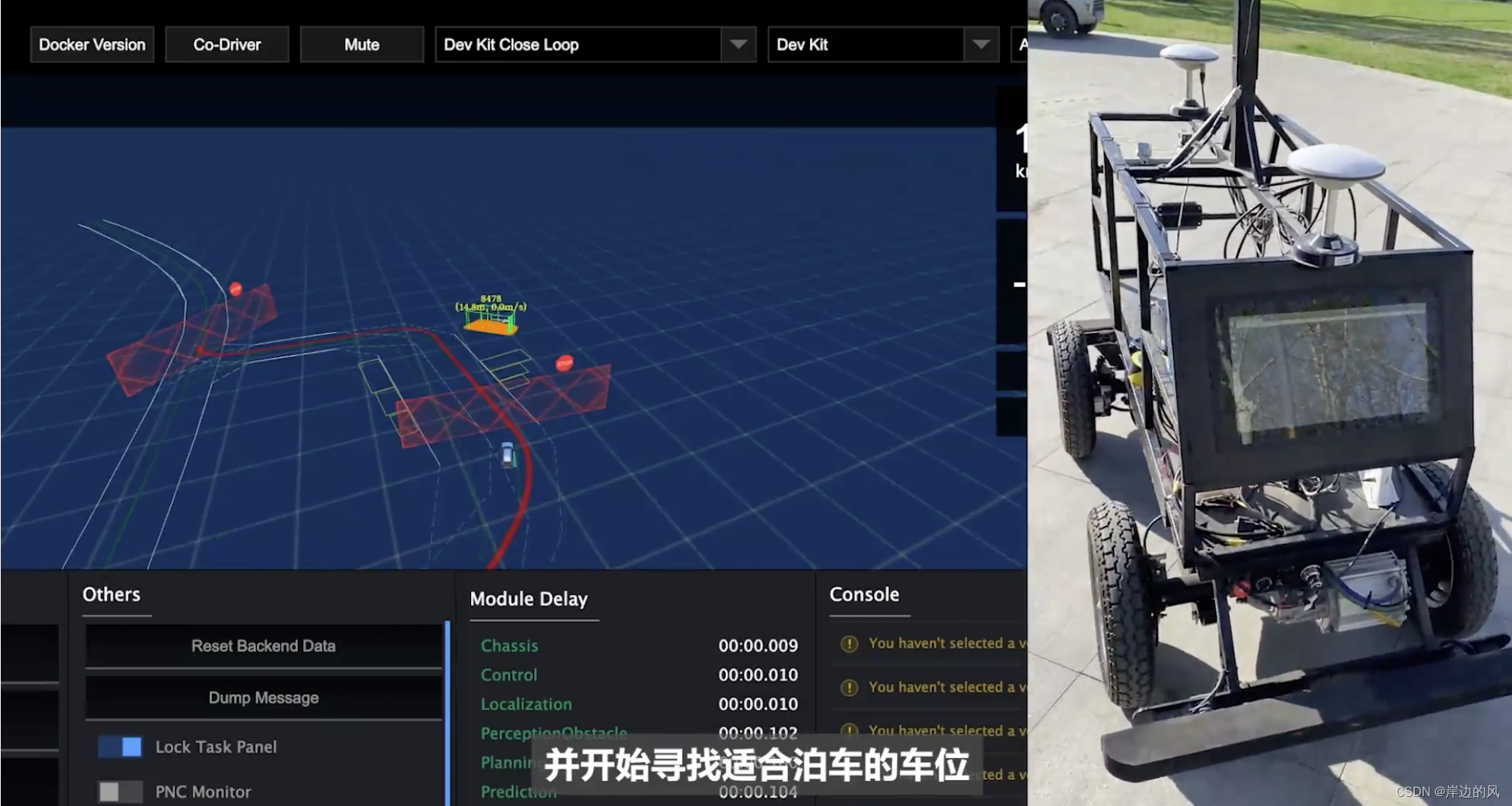
Apollo上机实践:一次对自动驾驶技术的亲身体验
上机实践 概述自动驾驶通信分布式系统开发模式开发工具 自动驾驶感知传感器特性感知流程及算法部署感知模型 自动驾驶决策规划决策规划流程和算法使用 Dreamview 进行控制在环的规划调试开发规划场景和算法 福利活动 主页传送门:📀 传送 概述 Apollo 是…

【Apollo学习笔记】——规划模块TASK之PATH_DECIDER
文章目录 前言PATH_DECIDER功能简介PATH_DECIDER相关配置PATH_DECIDER总体流程路径决策代码流程及框架MakeStaticObstacleDecision PATH_DECIDER相关子函数参考 前言
在Apollo星火计划学习笔记——Apollo路径规划算法原理与实践与【Apollo学习笔记】——Planning模块讲到……S…
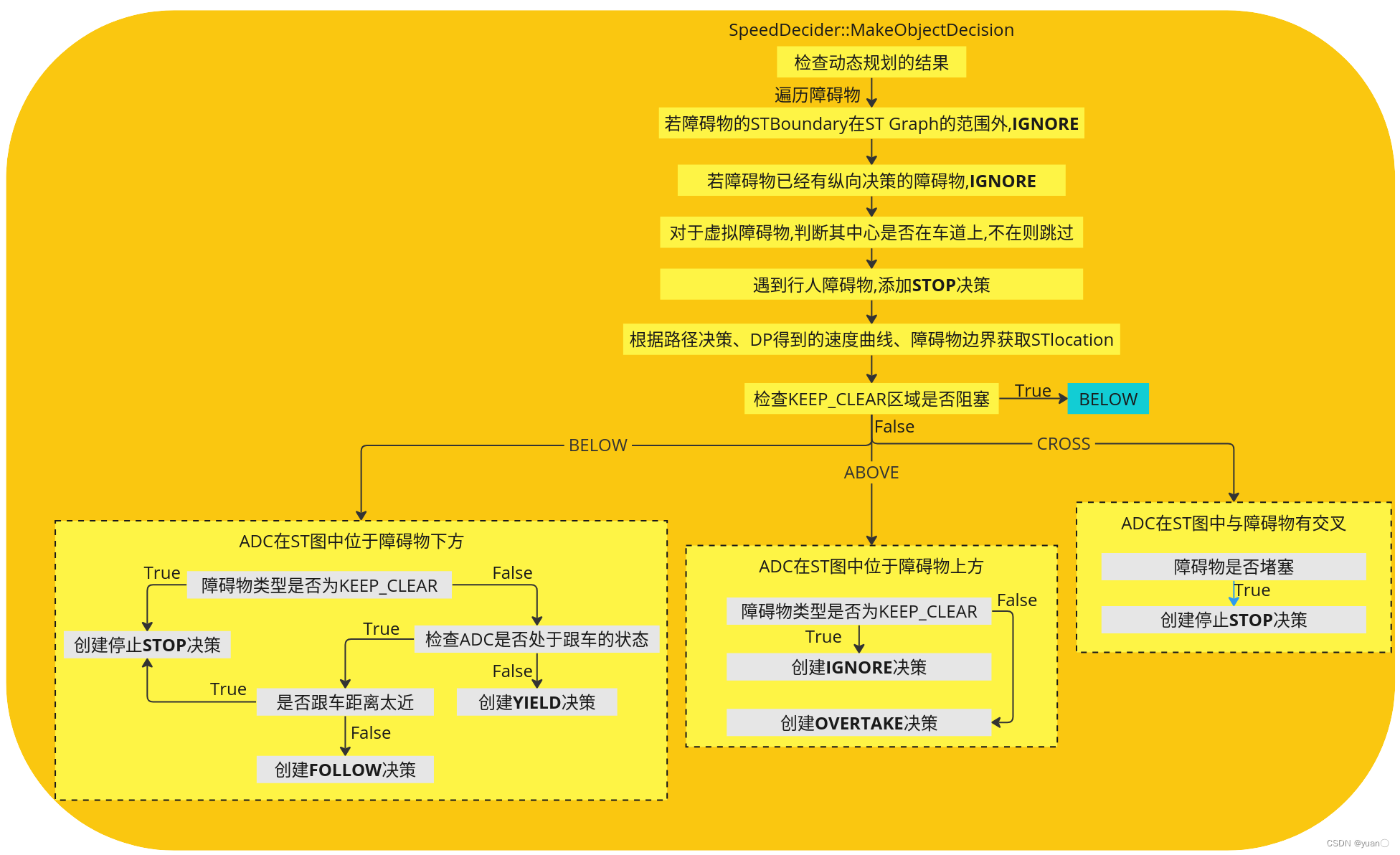
【Apollo学习笔记】——规划模块TASK之SPEED_DECIDER
文章目录 前言SPEED_DECIDER功能简介SPEED_DECIDER相关配置SPEED_DECIDER流程MakeObjectDecisionGetSTLocationCheck类函数CheckKeepClearCrossableCheckStopForPedestrianCheckIsFollowCheckKeepClearBlocked Create类函数 前言
在Apollo星火计划学习笔记——Apollo路径规划算…

Apollo接入配置中心 -- 源码分析之如何获取配置
全文参考:https://mp.weixin.qq.com/s/G5BV5BIdOtB3LlxNsr4ZDQ https://blog.csdn.net/crystonesc/article/details/106630412 https://www.cnblogs.com/deepSleeping/p/14565774.html 背景:近期在接入行内配置中心,因此对配置的加载接入有了…
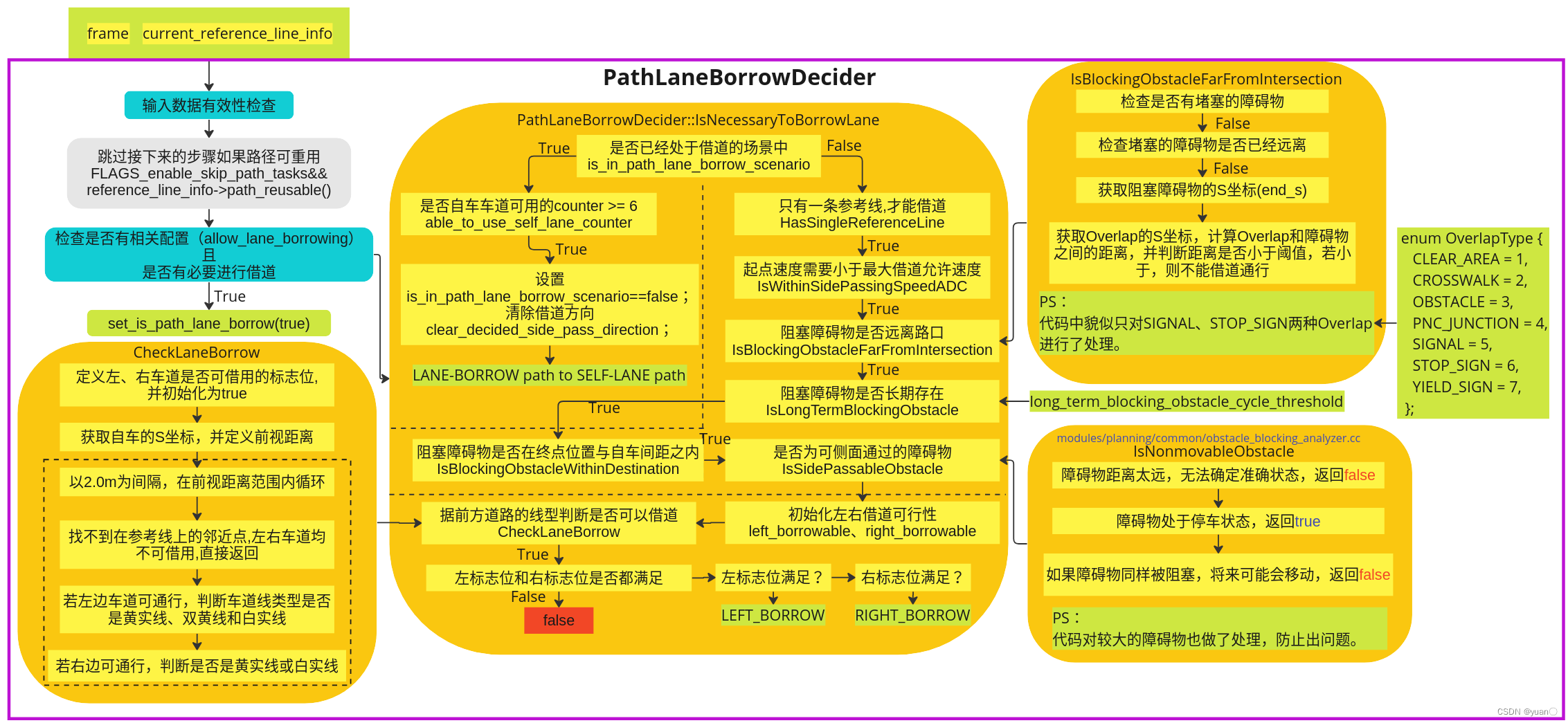
【Apollo学习笔记】——规划模块TASK之PATH_BORROW_DECIDER
文章目录 前言PATH_BORROW_DECIDER功能简介PATH_BORROW_DECIDER相关配置PATH_BORROW_DECIDER总体流程PATH_BORROW_DECIDER相关子函数IsNecessaryToBorrowLaneIsBlockingObstacleFarFromIntersectionIsNonmovableObstacleCheckLaneBorrow 参考 前言
在Apollo星火计划学习笔记—…

三招通过Apollo和nacos的能力进行国际化热更新
通过Apollo和nacos的能力进行国际化热更新
1.apollo的自动刷新
Apollo(阿波罗)是一款可靠的分布式配置管理中心,有了它,我们可以用来做很多事情:配置的热更新,配置监听,灰度发布,微…
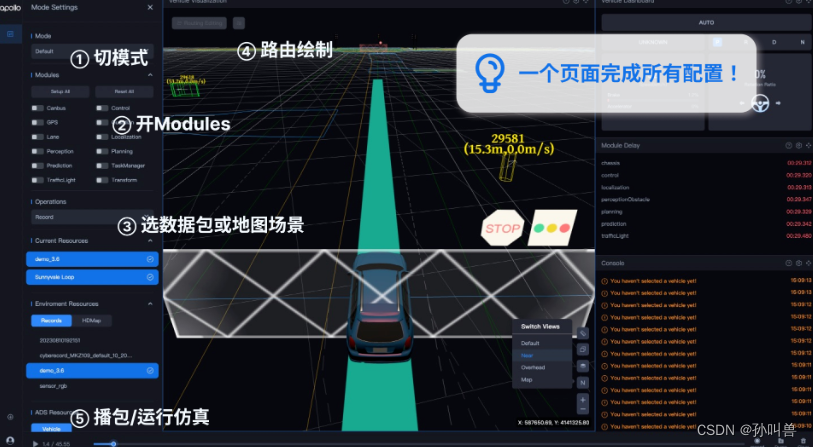
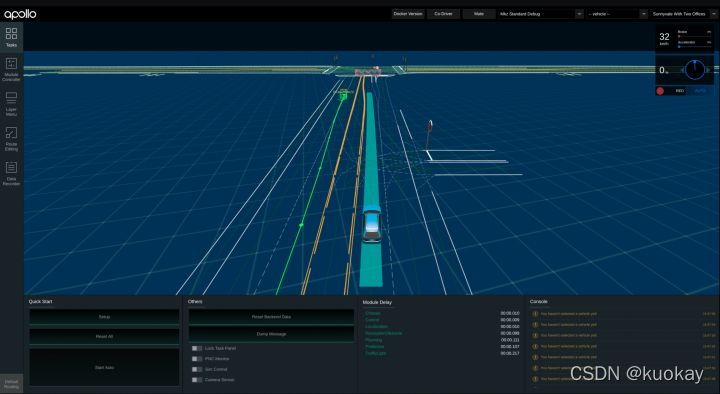
Apollo 快速上手指南:打造自动驾驶解决方案
快速上手 概述云端体验登录云端仿真环境 打开DreamView播放离线数据包PNC Monitor 内置的数据监视器cyber_monitor 实时通道信息视图福利活动 主页传送门:📀 传送 概述 Apollo 开放平台是一个开放的、完整的、安全的平台,将帮助汽车行业及自…
【Apollo学习笔记】——规划模块TASK之SPEED_BOUNDS_PRIORI_DECIDERSPEED_BOUNDS_FINAL_DECIDER
文章目录 前言SPEED_BOUNDS_PRIORI_DECIDER功能简介SPEED_BOUNDS_FINAL_DECIDER功能简介SPEED_BOUNDS_PRIORI_DECIDER相关配置SPEED_BOUNDS_FINAL_DECIDER相关配置SPEED_BOUNDS_DECIDER流程将障碍物映射到ST图中ComputeSTBoundary(PathDecision* path_decision)ComputeSTBounda…
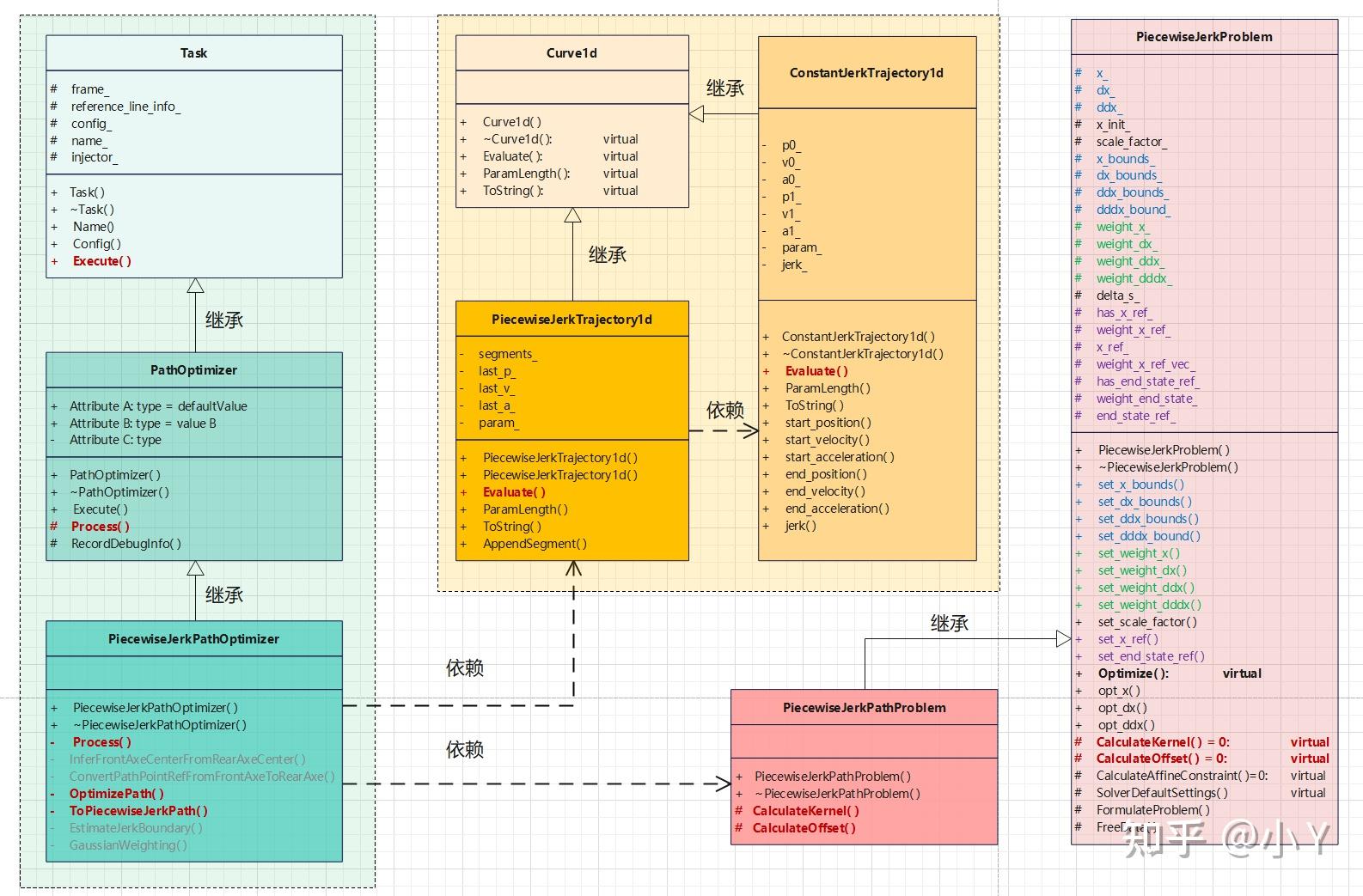
【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_PATH_OPTIMIZER
文章目录 前言PIECEWISE_JERK_PATH_OPTIMIZER功能简介PIECEWISE_JERK_PATH_OPTIMIZER相关配置PIECEWISE_JERK_PATH_OPTIMIZER总体流程OptimizePathpiecewise_jerk_problem二次规划问题标准形式定义优化变量定义目标函数设计约束OptimizeFormulateProblem计算QP系数矩阵Calculat…

apollo权限管理(五)
创建项目时,已经有项目管理的全部权限(项目负责人),项目负责人可以分配项目的权限
一,项目分配权限 在项目首页的左下方点击项目管理 添加项目管理人 添加成功显示如下:
二,集群分配权限…
Jasypt与Apollo一起使用造成Apollo热更新失效问题分析
文章目录 背景分析问题确认尝试本地复现远程debug 结论延伸思考1. 为什么apollo的配置会从jasypt类中获取呢?2. 能不能apollo配置变更时更新cache或使cache失效 解决方法 背景
近日业务同学反映在Apollo界面更改配置后, 服务中对应变量的值却没有改变 相关配置key定义如下:
…

百度Apollo新版本Beta技术沙龙参会体验
在自动驾驶领域,百度的Apollo一直是业界开源的标杆。其持续升级和创新的开源项目为整个自动驾驶行业树立了典范,不仅推动了技术的发展,也为广大的社区开发者们提供了学习和参考的范本。最近百度发布了Apollo新的Beta版本, 新版本B…

apollo灰度发布(七)
通过灰度发布功能,可以实现:
1.对于一些对程序有比较大影响的配置,可以先在一个或者多个实例生效,观察一段时间没问题后再全量发布配置。 2.对于一些需要调优的配置参数,可以通过灰度发布功能来实现A/B测试。可以在不…

apollo脱敏处理(八)
1.依赖:
<!--jasypt加密-->
<dependency><groupId>com.github.ulisesbocchio</groupId><artifactId>jasypt-spring-boot-starter</artifactId><version>1.16</version>
</dependency>2.加密工具类 只有加密…

apollo高可用(三)
目标:搭建dev环境下的高可用 1.在之前搭建的apollo基础上,在搭建一个dev环境 2.修改数据库(注意两个dev公用一个apolloconfigdb) 修改apolloconfigdb下表serviceconfig,两个dev的eureka地址都添上(就是apollo-configservice的地址…
apollo客户端的使用(二)
新建springboot项目 依赖: <!--apollo装的什么版本这里就用什么版本--><dependency><groupId>com.ctrip.framework.apollo</groupId><artifactId>apollo-client</artifactId><version>1.3.0</version></depend…
apollo集群(四)
原理和应用场景:
通过添加集群,可以使同一份程序在不同的集群(如不同的数据中心)使用不同的配置 如果不同集群使用一样的配置,则没有必要创建集群 Apollo默认会读取机器上/opt/settings/server.properties(linux)或C:…
Disconf、Apollo和Nacos分布式配置框架差异对比
差异对比表格:
功能点DisconfApolloNacos依赖高可用框架完全依赖于Zookeeper来实现监听拉取,向外提供了HTTP拉取数据接口依赖于Eureka实现内部服务发现注册,提供HTTP接口给Client SDK拉取监听数据内部自研实现框架高可用CAP理论偏重点Zookee…
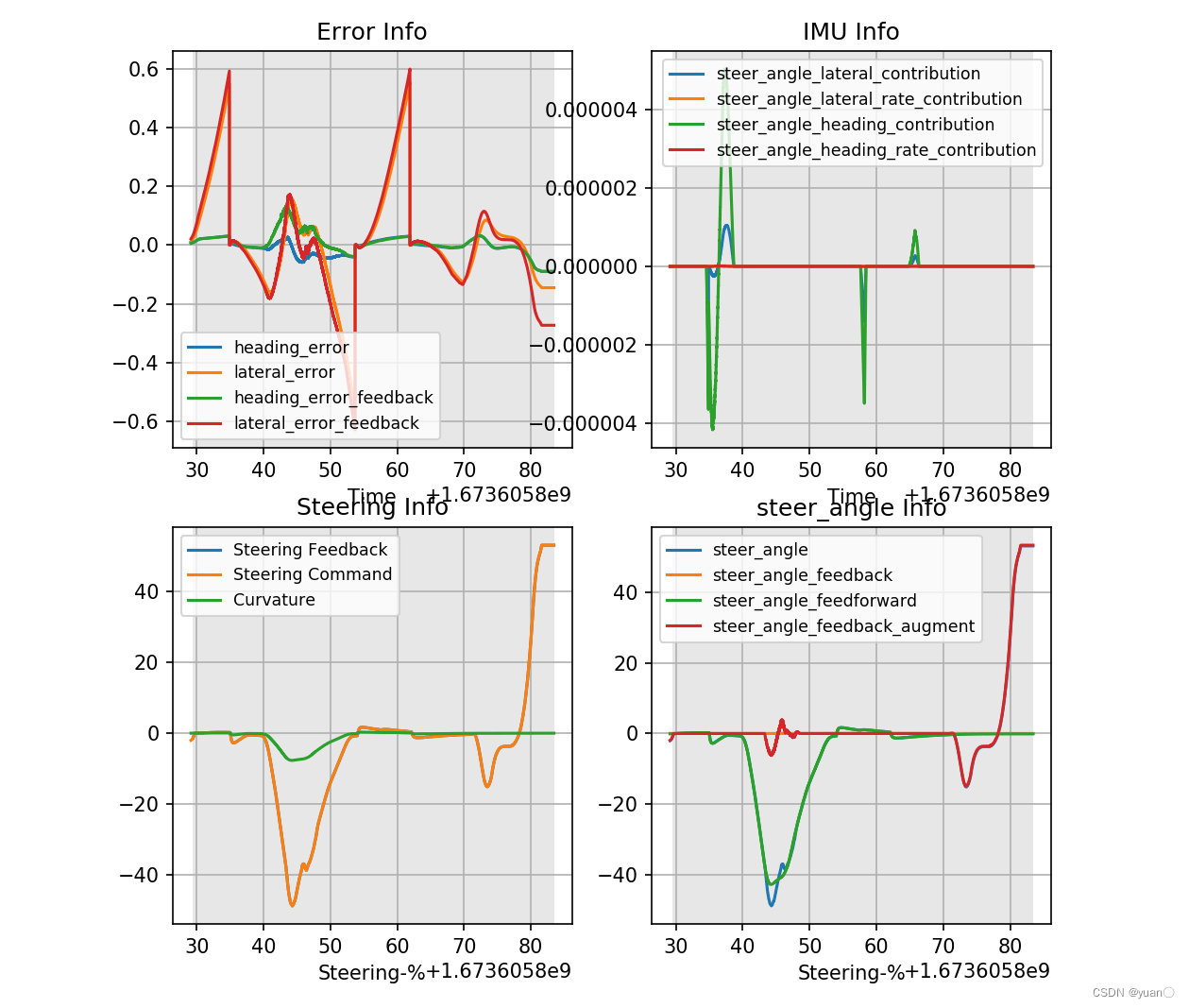
Apollo星火计划学习笔记——Control 专项讲解(LQR)
文章目录1. 算法相关基础1.1 一阶倒立摆1.2 二自由度车辆横向跟踪偏差模型1.3 车辆横向跟踪偏差模型1.4 车辆横向跟踪偏差倒车模型1.5 轮胎侧偏角与侧偏刚度1.6 LQR 线性二次型问题:2. LQR代码解析2.1 WriteHeaders(调试过程中的状态量)2.2 LatControlle…
Apollo原理--概览
apollo是怎么实现快速实时通知的? 答:使用pollNotification接口来进行实现长连接,当有变更立即响应客户端namespace的名字,然后客户端在调queryConfig接口查配置长连接是怎么实现的? 答:是使用轮询(循环)实…
SORA-SVL安装
后期总结 References
[1] 【仿真指南】ubuntu18.04apollo7.0lgsvl2021.3仿真指南 - 知乎
[2] LGSVL本地服务器环境搭建 - 哔哩哔哩
初识自动驾驶技术之旅 第一课 学习笔记
🎬 岸边的风:个人主页 🔥 个人专栏 :《 VUE 》 《 javaScript 》
⛺️ 生活的理想,就是为了理想的生活 ! 目录 📚 前言 📘 1. 自动驾驶人才需求与挑战 📘 2. Apollo …
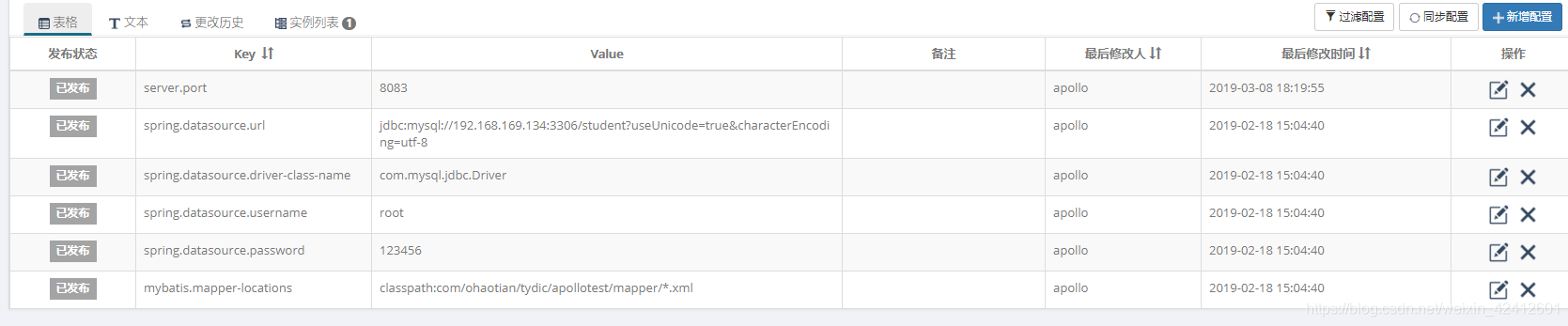
Apollo配置中心(Springboot接入)
apollo
apollo是一个分布式配置中心(其实也是一个微服务项目)。 原理就是把配置文件中的key,value的值存到Apollo中,然后项目启动的时候从Apollo中读取 1、为什么使用apollo 在我们开发分布式微服务项目的时候,那些配置一旦变更,就需要重启服…

Apollo新版本Beta自动驾驶技术沙龙参会体验有感—百度自动驾驶开源框架
在繁忙的都市生活中,我们时常对未来的科技发展充满了好奇和期待。而近日,我有幸参加了一场引领科技潮流的线下技术沙龙,主题便是探索自动驾驶的魅力——一个让我们身临其境感受创新、了解技术巨擘的机会。 在12月2日我有幸参加了Apollo新版本…

【论文笔记】Baidu Apollo EM Motion Planner
文章目录 AbstractI. INTRODUCTIONA. Multilane StrategyB. Path-Speed Iterative AlgorithmC. Decisions and Traffic Regulations II. EM PLANNER FRAMEWORK WITH MULTILANE STRATEGYIII. EM PLANNER AT LANE LEVELA. SL and ST Mapping (E-step)B. M-Step DP PathC. M-Step …

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER(一)
文章目录 TASK系列解析文章前言PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER功能介绍PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER相关配置PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER流程确定优化变量定义目标函数定义约束ProcessSetUpStatesAndBoundsOptimizeByQPCheckSpeedLimitF…

【Apollo学习笔记】——规划模块TASK之RULE_BASED_STOP_DECIDER
文章目录 前言RULE_BASED_STOP_DECIDER相关配置RULE_BASED_STOP_DECIDER总体流程StopOnSidePassCheckClearDoneCheckSidePassStopIsPerceptionBlockedIsClearToChangeLaneCheckSidePassStopBuildStopDecisionELSE:涉及到的一些其他函数NormalizeAngleSelfRotate CheckLaneChang…

分布式配置中心Apollo系列--概念及原理介绍
1、Apollo简介
Apollo(阿波罗)是携程框架部门研发的开源配置管理中心,能够集中化管理应用不同环境、不同集群的配置,配置修改后能够实时推送到应用端,并且具备规范的权限、流程治理等特性。
Apollo支持4个维度管理Ke…

激光雷达:自动驾驶的眼睛
激光雷达:自动驾驶的眼睛 文章目录 引言激光雷达的原理自动驾驶中的应用激光雷达的优势激光雷达的挑战结论结论 2023星火培训【专项营】Apollo开发者社区布道师倾力打造,包含PnC、新感知等的全新专项课程上线了。理论与实践相结合,全新的PnC培…

【Apollo学习笔记】——规划模块TASK之PATH_ASSESSMENT_DECIDER
文章目录 前言PATH_ASSESSMENT_DECIDER功能简介PATH_ASSESSMENT_DECIDER相关信息PATH_ASSESSMENT_DECIDER总体流程1. 去除无效路径2. 分析并加入重要信息给speed决策SetPathInfoSetPathPointType 3. 排序选择最优的路径4. 更新必要的信息 前言
在Apollo星火计划学习笔记——Ap…
监听 apollo 配置变化
监听 apollo 配置 cleanPrecisionVersion 变化的类 源码
Component
Order(value Ordered.HIGHEST_PRECEDENCE)
Slf4j
public class InitApolloConfigure implements CommandLineRunner {// 内存缓存private volatile ConcurrentHashMap<String, List<String>> cl…

【Apollo学习笔记】——规划模块TASK之PATH_REUSE_DECIDER
文章目录 前言PATH_REUSE_DECIDER功能简介PATH_REUSE_DECIDER相关配置PATH_REUSE_DECIDER总体流程PATH_REUSE_DECIDER相关子函数IsCollisionFreeTrimHistoryPathIsIgnoredBlockingObstacle和GetBlockingObstacleS Else参考 前言
在Apollo星火计划学习笔记——Apollo路径规划算…

百度Apollo(二):障碍物感知模块
Apollo感知模块具有识别障碍物和交通灯的能力。 其中,Apollo解决的障碍物感知问题: 1. 高精地图ROI过滤器(HDMap ROI Filter) 2. 基于卷积神经网络分割(CNN Segmentation) 3. MinBox 障碍物边框构建&am…
在ubuntu18.04上体验百度Apollo6.0自动驾驶
前言
Apollo 是优秀的自动驾驶开发框架,出自百度之手,目前已更新到 6.0 版本,本文旨在详细记录 Apollo 6.0 在 Ubuntu 18.04 中的完整安装及运行过程,并会阐述在虚拟机和物理机中进行安装时的细微区别。 前置依赖软件安装
一、电…
ubuntu安装apollo仿真平台
ubuntu安装apollo仿真平台
首先安装docker:sudo apt-get install -y docker.iogit clone https://github.com/ApolloAuto/apollocd apollo/bash docker/scripts/dev_start.shbash docker/scripts/dev_into.shbash apollo.sh buildbash scripts/bootstrap.sh //启动…

如何利用apache-apollo构建MQTT服务器
一、下载apache-apollo文件
下载地址: 下载Windows版本的压缩包。
二、解压后如下。
三、将文件拷贝到工作目录下。
四、进入DOS模式下进行配置。 说明: 1、dos模式下,进入E盘:E: 2、进入某个文件夹:c…
apollo云实验:定速巡航场景仿真调试
定速巡航场景仿真调试 概述启动仿真环境仿真系统修改默认巡航速度 实验目的福利活动 主页传送门:📀 传送 概述 自动驾驶汽车在实现落地应用前,需要经历大量的道路测试来验证算法的可行性和系统的稳定性,但道路测试存在成本高昂、…
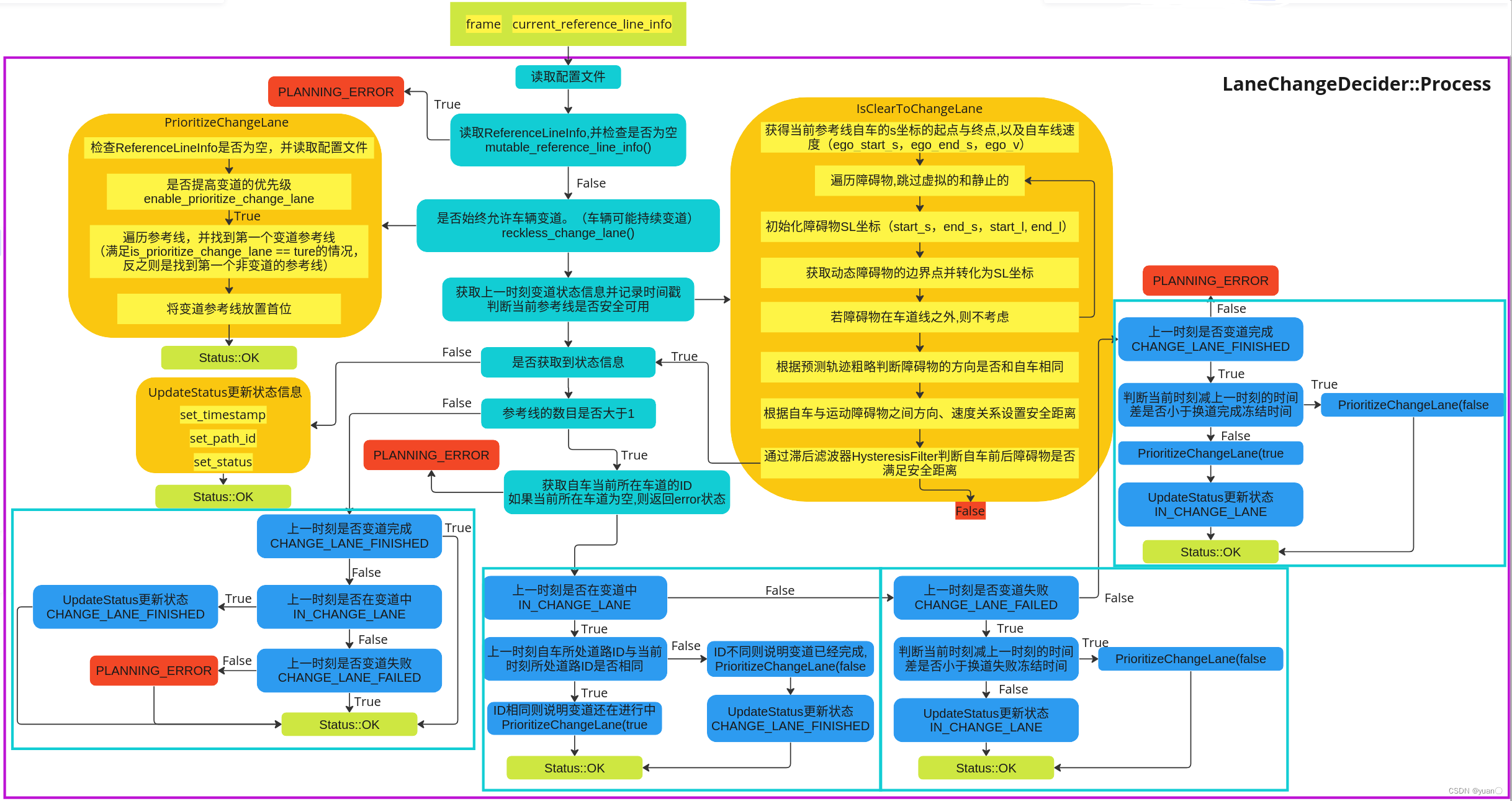
【Apollo学习笔记】——规划模块TASK之LANE_CHANGE_DECIDER
文章目录 前言LANE_CHANGE_DECIDER功能简介LANE_CHANGE_DECIDER相关配置LANE_CHANGE_DECIDER总体流程LANE_CHANGE_DECIDER相关子函数PrioritizeChangeLaneUpdateStatusIsClearToChangeLaneHysteresisFilter 参考 前言
在Apollo星火计划学习笔记——Apollo路径规划算法原理与实…

CentOS7使用docker部署Apollo配置中心
Apollo开源地址:
https://github.com/ctripcorp/apollo
第一步
将项目clone到本地,然后在github的releases页面中下载三个zip文件
本文中重点讲解截止2019年1月最新的1.2.0版本的部署方法
第二步
打开clone到本地的项目,目录结构如下 第…

自动驾驶技术:现状与未来
自动驾驶技术:现状与未来 文章目录 引言自动驾驶技术的现状自动驾驶技术的挑战自动驾驶技术的未来结论结论 2023星火培训【专项营】Apollo开发者社区布道师倾力打造,包含PnC、新感知等的全新专项课程上线了。理论与实践相结合,全新的PnC培训不…
ros2移植Apollo的Lattcie的部分算法并实现与carla0.9.13的联合仿真
ros2移植Apollo的Lattcie的部分算法并实现与carla0.9.13的联合仿真
python版本说明
ubuntu18.04的ros2不能像ros1一样使用python2.7,必须是3.7!!!
选择一:系统安装的python3.7(ubuntu18.04不适用&#x…
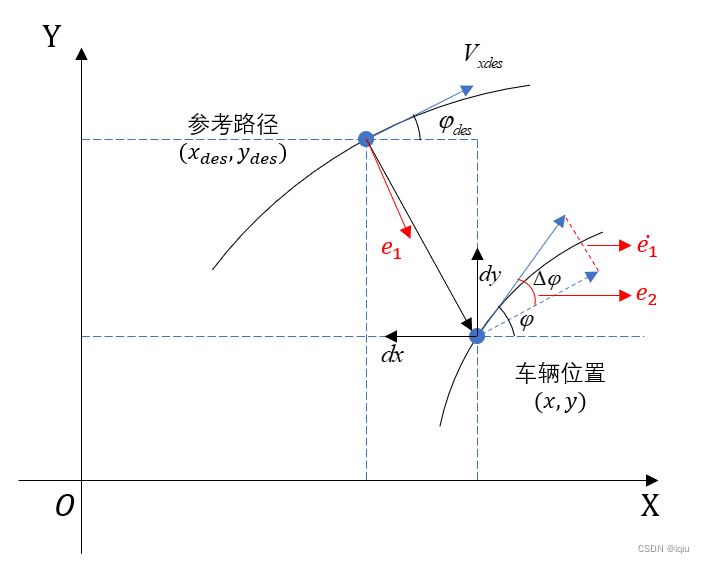
Apollo控制部分3-- 车辆动力学模型详解
Apollo控制部分3-- 车辆动力学模型详解摘要一、预备知识二、轮胎坐标系三、车辆自行车模型公式推导四、参考路径误差模型author:Wutong time:2023-03-17 20:05
摘要
动力学模型分析是整个无人车控制模块的基础,同时也是动力学模型是否准确也…
Apollo配置中心 自动热更新组件
在使用Apollo配置中心的时候,我们时常需要自己写热更新属性的代码!好像Apollo也提供了热更新,但是只支持 Value注解的。然后我自己写了一个自动更新的组件 apollo-hotupdate,暂时只支持spring boot,下面带大家使用一下…

springcloud学习(六) apollo编译源码使用并将eureka替换为自己的eureka服务
apollo编译源码使用并将eureka替换为自己的eureka服务 apollo配置中心默认configserver 自带了eureka,将其改为自己的eureka服务 1 下载源码,下载地址,目前最新为1.0.0使用IDEA打开
2 导入数据库文件,数据库文件在源码srcripts/sql下&#x…