restful
缩位求和
css3
jstl
excel
深度遍历
存储型XSS
layui
视频编解码
统计学
CLIP
火鹰优化算法
File的创建功能
html静态页面
虚拟主机
iwebsec
webshell链接
远程医疗
系统架构设计案例分析常考知识点
技术
三维
2024/4/12 14:59:12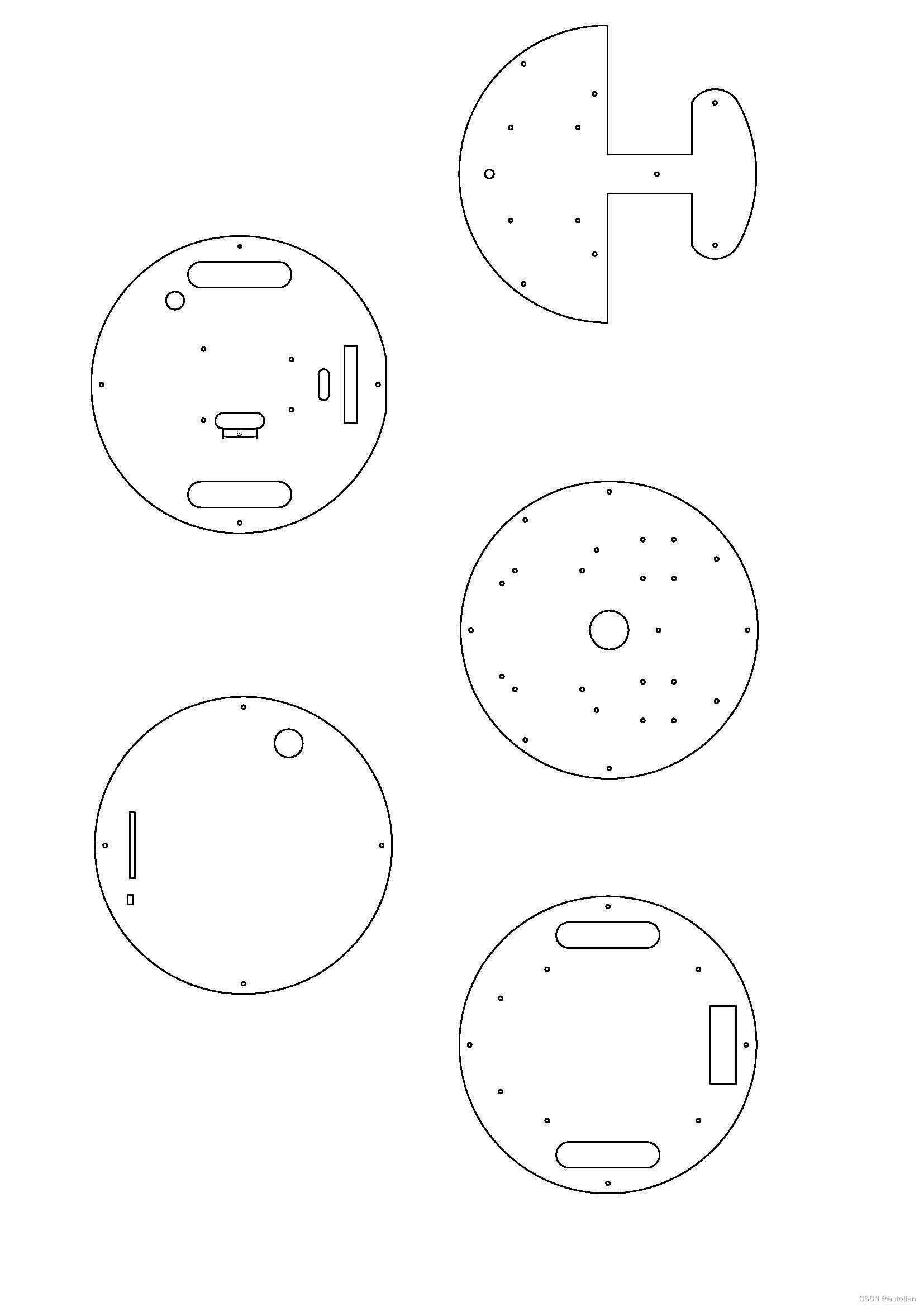
ROS移动机器人 Solidworks整个机器人设计文件(三维 激光雷达 arduino nvidia)(SLDPRT SLDASM)
还是17年本科时制作的毕业设计,基于solidworks 2014所制作。
文件里包含了制作的整个移动机器人的SolidWorks原文件。
是设计完各个零件然后组合在一起的,所以适用性很强,可以根据你的需求将绘制的零件加到你的机器人solidwroks三维中&…

三维数据入到arcgis平台的解决方案
目录
1、传统建模数据
①obj、dae、3ds等模型纹理颜色或者贴图不显示
②加载wrl数据贴图丢失
③将obj模型导入到arcgispro出现异常情况
④zoom to layer选项失效导致三维数据不显示
⑤multipatch转slpk模型贴图有细缝
⑥skp数据无法导入到arcgispro
⑦拆分三维模型
⑧…
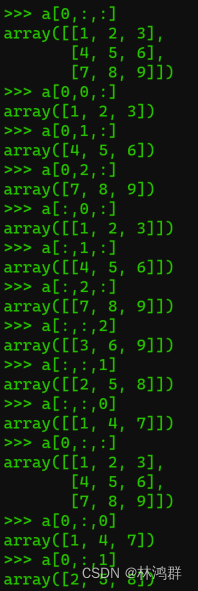
numpy二维与三维数组简单操作示例
1.运行PowerShell然后输入python 2.在python命令行输入 import numpy as np进入导入numpy库并添加别名为np 3.使用numpy的zeros函数创建一个2行4列的全0矩阵 4.查看上面创建的全0矩阵 5.查看矩阵类型 6.使用numpy的ones函数创建一个2行4列全1的矩阵 ,并查看类型及矩阵中的数据 …

三维空间中视角位置和物体取向的确定
1.确定位置
我们要在三维空间中确定一个物体,或者定位一个视角:如果物体是一个对称物体,即我们不需要确定他的姿态,我们有两种方式确定它的位置。
1.1世界坐标系
世界坐标系是一个特殊的坐标系,它建立了描述其他坐标…

three.js 3D可视化地图
threejs地图 可视化地图——three.js实现
this.provinceInfo document.getElementById(provinceInfo);
// 渲染器
this.renderer new THREE.WebGLRenderer({antialias: true
});
this.renderer.setSize(window.innerWidth, window.innerHeight);
this.container.appendChild…

三维变换矩阵左乘和右乘分析
我在前面博客中提到,当三维坐标点发生旋转时,如果采用矩阵运算就会需要考虑“左乘”和“右乘”。若绕静坐标系(世界坐标系)旋转,则左乘,也是变换矩阵*坐标矩阵;若是绕动坐标系旋转(自…
1 三维点云匹配方案
一 ICP算法原理
《ICP算法在点云配准中的应用》由协方差矩阵构造4*4矩阵,然后计算该矩阵的特征值和特征向量,为啥最大特征值对应的特征向量即为最佳旋转向量?
二 ICP算法优缺点
1 优点
精度能够满足要求
2 缺点
时间代价O(NpNx)
3 改进…
Html网页threejs显示obj,ply三维图像实例
程序示例精选 Html网页threejs显示obj,ply三维图像实例 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对《Html网页threejs显示obj,ply三维图像实例》编写代码,代码整洁࿰…
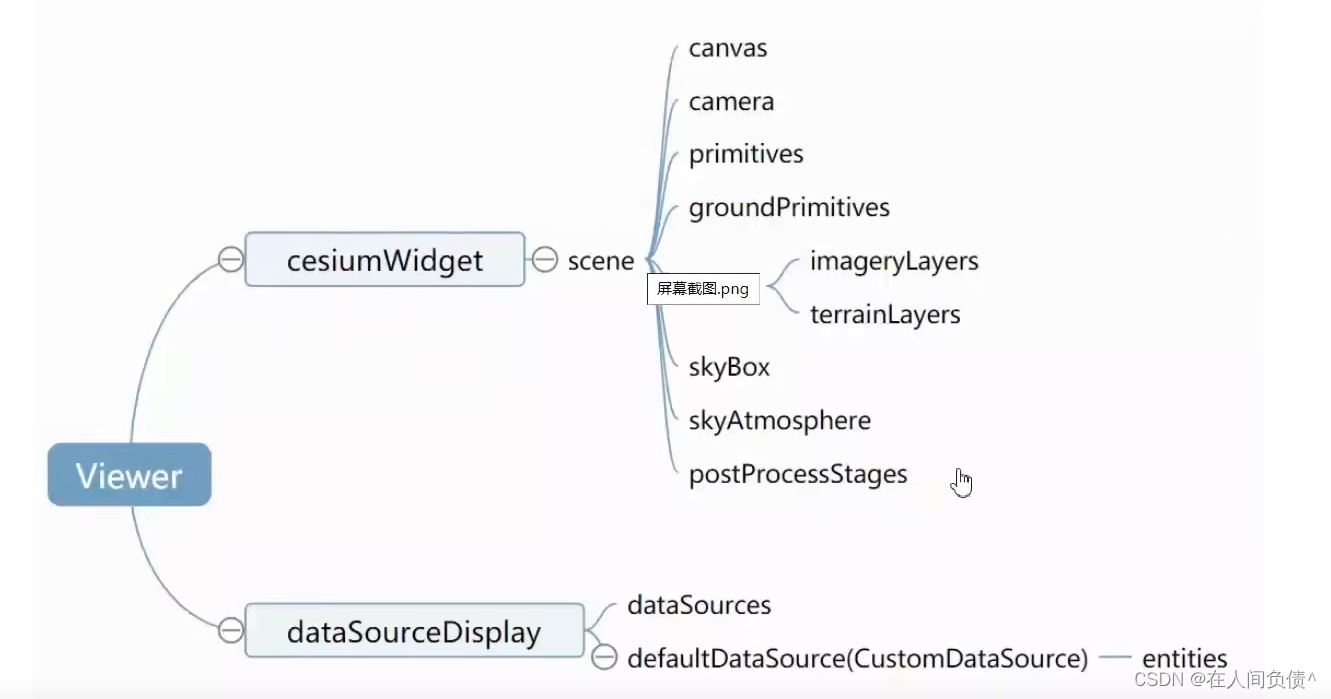
Cesium快速上手10-Viewer/Entities组合
Cesium快速上手10-Viewer/Entities组合const viewer new Cesium.Viewer("cesiumContainer");http://localhost:8080/Apps/Sandcastle/index.html?labelTutorials Viewer/Entities的作用:
方便创建直观的对象,同时做到性能优化(b…

Obj 转 3DTiles(瓦片数据带有LOD)
目录 0 引言1 数据类型介绍1.1 Obj数据1.2 3DTiles1.2.1 简介1.2.2 3DTiles格式的LOD是如何定义1.2.3 文件后缀格式 2 转换工具 🙋♂️ 作者:海码007📜 专栏:CesiumforUnreal专栏💥 标题:Obj 转 3DTiles&…
02.Cesium源码编译及搭建开发环境
开始之前,默认你已经掌握了一定的前端知识,文章中用到的一些前端知识不再展开解释,如果你有不明白的地方,请自行学习。 另外,本篇文章及后续的文章首先会使用原生JS的方式 进行实例的开发,Vue版本会在后期文…
处理点云数据(二):点云与生成前视图
创建点云数据中的前视图
前视图投影
为了将激光雷达传感器的前视图平面化为二维图像,必须将三维空间中的点投影到可以展开的圆柱形表面上,以将其平面化。下面公式见论文Vehicle Detection from 3D Lidar Using Fully Convolutional Network
# h_res …
光学三维测量-核心期刊
查看期刊分区:中国科学院文献情报中心期刊分区表
三维测量及三维重建方面的核心期刊:
1. Nature Photonics
2. Light: Science & Applications
3.Optica(1区, SCI)
4. OPTICS EXPRESS(2区,SCI)
5. OPTICS LETTERS(2区,SCI)
6. A…

C#自动化为三维数组设置下标和元素
用for循环设置二维数组下标和元素
https://blog.csdn.net/number1killer/article/details/80027994
一个意外导致数组中的元素无限循环的实例_https://blog.csdn.net/number1killer/article/details/80021129遍历数组 https://blog.csdn.net/number1killer/article…

工业机器人——工件定位问题
需求分析:在工业机器人中进行工件的定位的时候,需要知道工件相对于机器人来说,在什么位置。
首先,我们需要得到的就是通过雷达激光扫描或者其他方式得到的点云数据,然后对点云数据进行分析。 下面是我们目前得到的点…
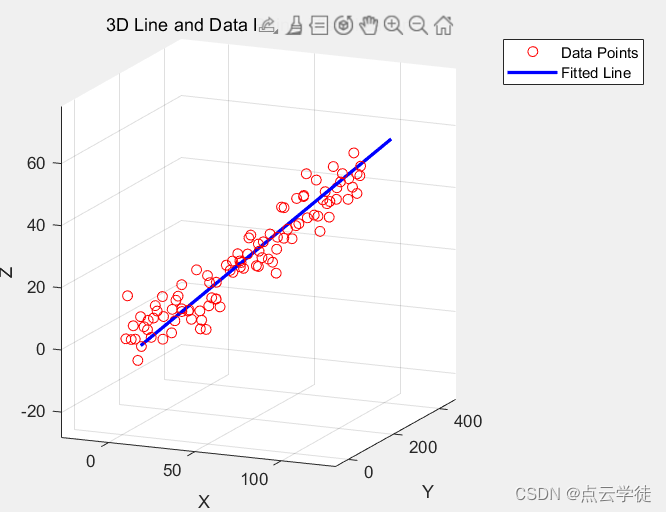
MATLAB 最小二乘空间直线拟合 (37)
MATLAB 最小二乘空间直线拟合 (37) 一、算法介绍二、算法实现1.代码一、算法介绍
对于空间中的这样一组点:大致呈直线分布,散乱分布在直线左右, 我们可采用最小二乘方法拟合直线,使用下面的代码可以得到图中的结果。(其中图片中的点解释和具体的实现代码如下所示) C++…
3D三维数据格式分类(种类/软件平台)
一、按照数据种类格式
3D模型格式:
.obj - 一种通用的3D模型格式.dae - Collada (数字资产交换).gltf, .glb - GL Transmission Format (用于3D场景和模型).max - Autodesk 3ds Max (3D动画、模型制作、渲染).fbx - Autodesk Filmbox格式 (3D动画和游戏开发).ma, .mb - Maya …


一套开源三维管线管理系统
Pipeline
介绍
二次开发源码开源的三维管线地理信息系统:
包括:
三维地图浏览/定位管线快速查询 材质查询 / 管径查询 / 管块查询 / 埋设日期查询 / 复合条件查询 / 空间查询管线数据统计管径分段统计 埋深分段统计 / 材质分类统计 / 管径分类统计 / 综合统计应…

添加场景(模型)到三维空间
基本思想
将模型添加到三维空间中,即确定其在三维空间中的位置和姿态,我们只需要确定其在世界坐标系中的位置(position)和其在三维空间中的姿态(orientation即可)
一些基本概念可以参考我上一篇博客 三维…
QML 3D入门知识路线
目前使用的版本 v5.14.0 模块导入 使用QML 3D时需要 import Qt3D.Core 2.14 核心模块类 V6以上的版本已经发布,所以有很多module会发生变化,主要有核心module、输入、逻辑、渲染、动画和扩展module,以及2D/3D场景模块
类名 能…
C#自动设置三维数组并对其进行排序
自动化为三维数组设置下标和元素
https://blog.csdn.net/number1killer/article/details/80062718
程序算法之逆推法(猴子摘桃问题正解)
https://blog.csdn.net/number1killer/article/details/78092587
用for循环设置二维数组下标和元素 https://blog.c…
Progressive Tree-Based Compression of Large-Scale Particle Data | 学习笔记
这里写目录标题 目标摘要1.简介2.相关工作3.背景4. 树的构造4.1 奇偶分裂与奇偶树4.2 混合树4.3 块混合树5. 树遍历5.1 自适应遍历5.2块自适应遍历6. 编码节点值6.1 二项编码方案6.2 奇偶上下文编码7 评估和结果7.1 k-d树自适应遍历7.2 混合树和块混合树的遍历7.3 速度和内存占…

VS+QT+VTK三维曲面网格点选切割
程序示例精选 VSQTVTK三维曲面网格点选切割 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对<<VSQTVTK三维曲面网格点选切割>>编写代码,代码整洁,规则&…
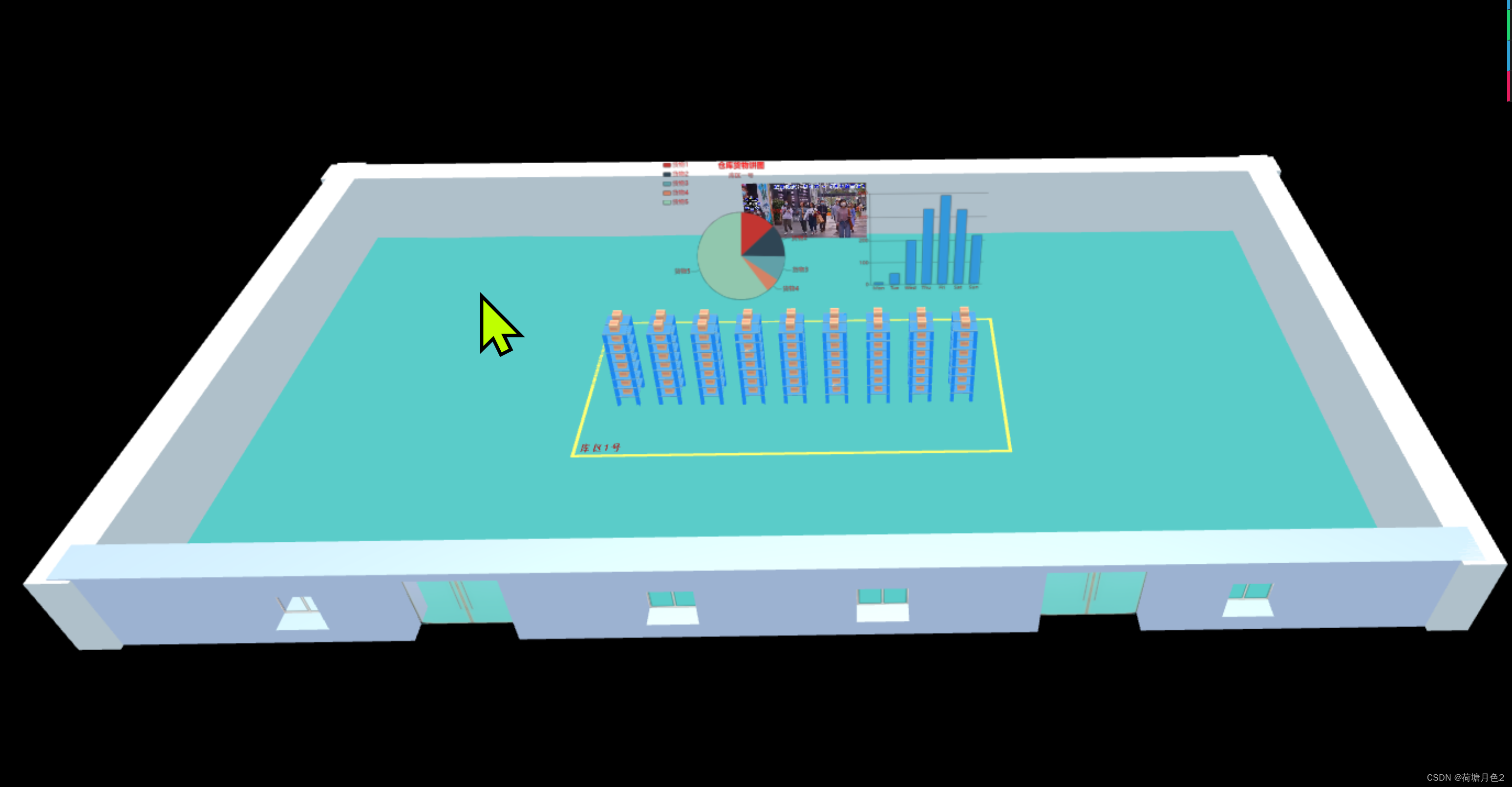
Html+threejs数字孪生三维场景实现
程序示例精选 Htmlthreejs数字孪生三维场景实现 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对《Htmlthreejs数字孪生三维场景实现》编写代码,代码整洁,规则…
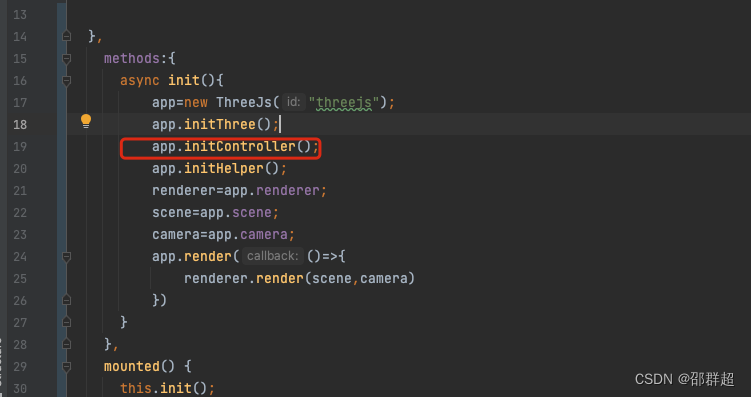
在Vue中搭建Three.js环境(超详细、保姆级),创建场景、相机、渲染器《一》
目录 Three.js简介创建vue项目引入Three.js实际操作环节文件目录创建初始化场景、相机 Three.js简介
Three.js 是一款基于 WebGL的 JavaScript 3D 库,它封装了 WebGL API,为开发者提供了简单易用的 API 来在 Web 浏览器中展示 3D 图形。Three.js 提供了…

C++ PCL点云局部颜色变换
程序示例精选 C PCL点云局部颜色变换 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对《C PCL点云局部颜色变换》编写代码,代码整洁,规则,易读。 学习与应用…

Cesium叠加超图二维服务、三维场景模型
前言 Cesium作为开源的库要加超图的服务则需要适配层去桥接超图与Cesium的数据格式。这个工作iClient系列已经做好,相比用过超图二维的道友们可以理解:要用Openlayer加载超图二维,那就用iClient for Openlayer库去加载;同样的要用…
blender2.8 使用教程 贴图纹理快捷键等。
新版本blender2.8虽然与2.79版本号只差0.01,但却有着天翻地覆的变化。新版本功能更加强大,交互更加人性,但也有不少问题。 新版本不仅支持雕塑功能,还支持编辑uv,但是,mac系统瞎绝不能用 texturepaint 闪退…
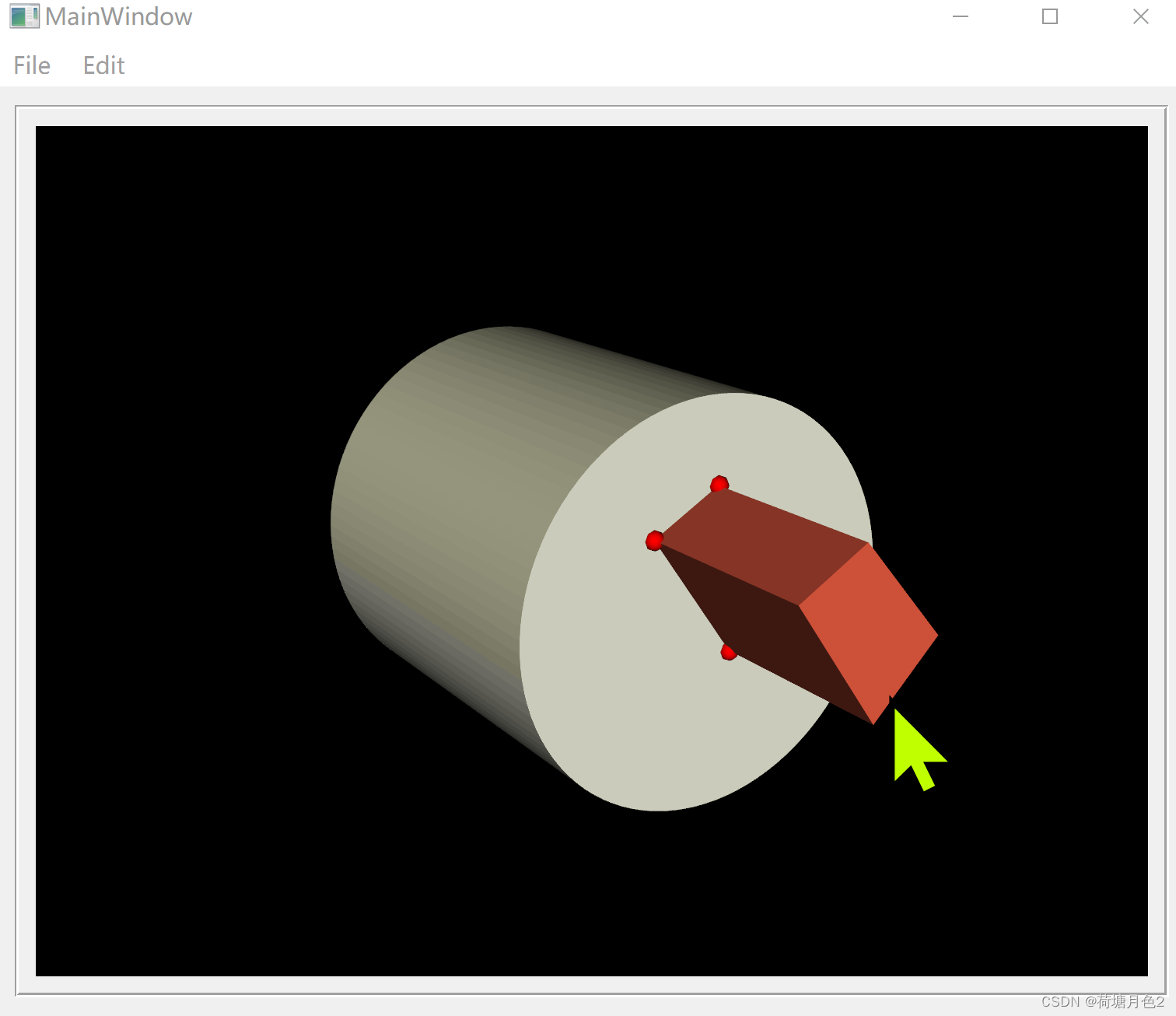
Qt+VTK鼠标拾取点生成拉伸闭合三维体
程序示例精选 QtVTK鼠标拾取点生成拉伸闭合三维体 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对《QtVTK鼠标拾取点生成拉伸闭合三维体》编写代码,代码整洁,规则&…

倾斜摄影数据如何转为slpk
需求:
倾斜摄影数据如何转为arcgis的slpk(scene layer package场景图层包),方便后期场景服务发布和前端、移动端等终端调用。
具体场景:
场景一(针对大场景):如果原始数据是无人机…

如何将三维模型移动到真实位置
需求:
使用3dmax或者sketchup等软件制作的三维模型(3ds、obj、dae、wrl、flt等),由于这些三维软件没有定义gis坐标系等参数选项,默认将这些模型导入到arcgis中,模型是没有空间参考的,这时就产生…
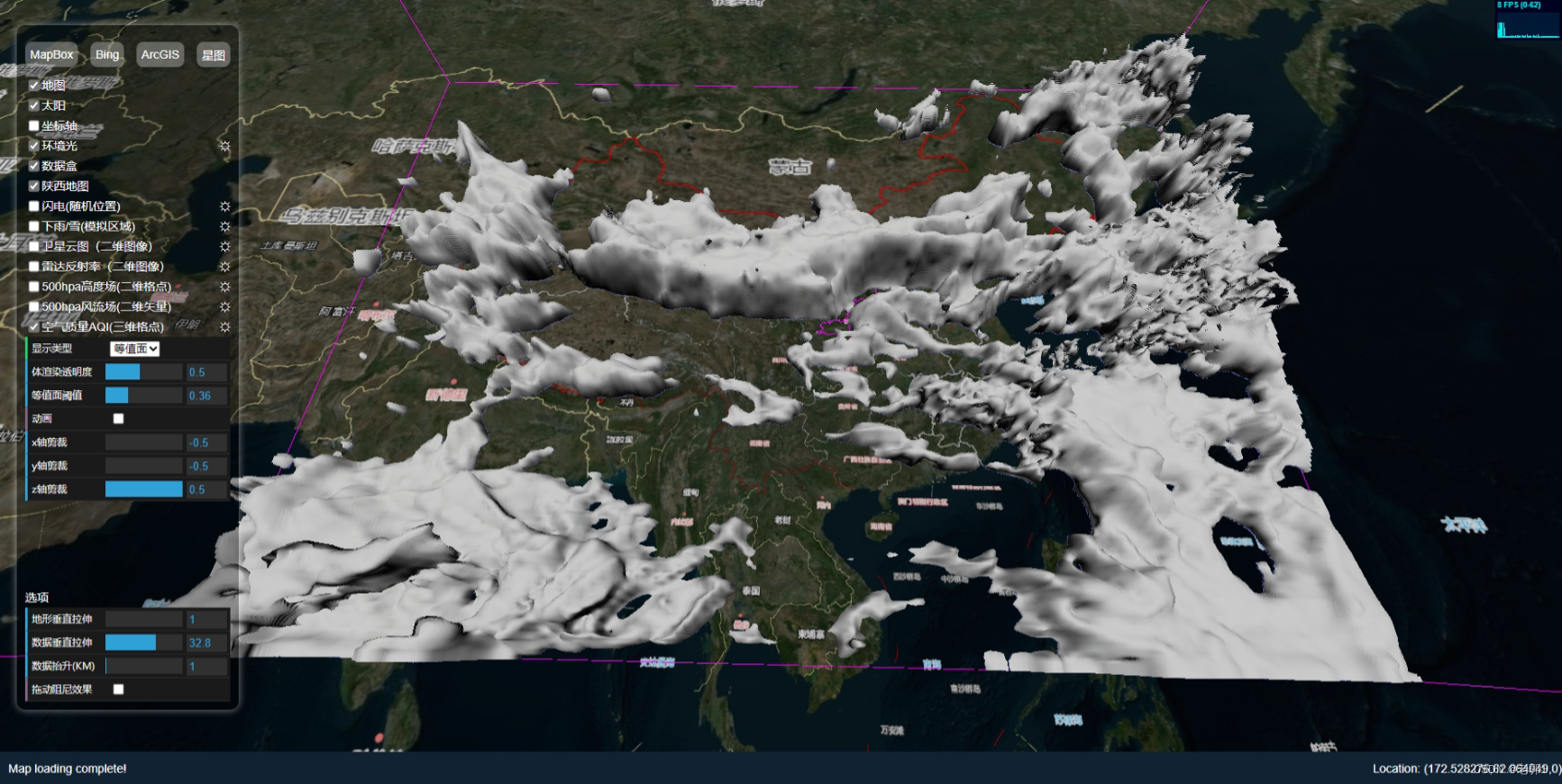
three-tile: 手写一套三维瓦片地图框架,大家是否有兴趣?
提到web端三维地图,最火的非cesium莫属,逼真的三维地图渲染技术叹为观止,但复杂的代码也让大部分程序员望尘莫及。
其实市面上的三维Gis平台还有不少,包括GoogleEather、WorldWind、Virtual Earth、ArcGIS、Mapbox-g、iTwons、pr…
Python中图像的数组化存储方式
一张720*250的RGB图片,个人感觉图片是说的长乘以宽(长720个像素宽250个像素),跟数组的m*n,m行n列还不一样,所以会以250*720*3的方式存在一个三维数组中(250行720列),在python的Variable Explore…

TWaver可视化软件(一)初识三维可视化软件
随着5G和物联网的浪潮席卷而来,数据可视化这个概念也渐渐变得炙手可热,万物互联的时代,可视化将带来全新的管理运营方式。数据可视化,简言之就是将数据以可视图表的形式展现出来,以直观的形式挖掘数据深层次的价值&…

双目视觉测距离(三维重建)
看到好的东西就想转载和大家一起分享一起学习!!!来源:http://blog.csdn.net/tiemaxiaosu/article/details/51734667一、三维重建概述三维重建主要是研究如何从得到的匹配点中计算出相机的投影矩阵(如果是外部标定的话,…

基于Kinect-OpenNI-OpenCV-OpenGL的环境三维重构 windows vs2008 深度彩色图像
地址:http://wiki.opencv.org.cn/index.php/%E5%9F%BA%E4%BA%8EKinect-OpenNI-OpenCV-OpenGL%E7%9A%84%E7%8E%AF%E5%A2%83%E4%B8%89%E7%BB%B4%E9%87%8D%E6%9E%84
前几天刚入手了期待已久的 Kinect ,用于实验室机器人项目的视觉导航与环境理解。
首先…

Cesium开源三维地球离线地图发布源码示例功能
一、概述
Cesium开源三维地球离线地图发布源码提供了地图切换、查询定位、模型加载、专题图叠加显示和测量功能等,旨在为用户提供一个可以在Cesium快速加载离线地图或在线地图的解决方案,并提供技术支持。
除了现有基本功能之外,还可以根据…

使用开源技术搭建一套轻量化二维+三维GIS系统技术选项
相信很多大佬有不少技术路线,本文讲的可能是比较常见的一种。 用到的关键组件: GeoServer(入门会用)Curl(入门会用)QGIS(入门会用)LeafLet/OpenLayers/Mapbox之一(入门会用)Cesiumjs(入门会用)PostgresqlPostGISSLD(初步了解)obj2gltfNodejs 按照这样一个…
Visual hull
选自WiKi和一些blog上的资料,并结合一些文献做出的总结。在计算机动画、游戏和虚拟现实等领域中都涉及到大量的三维模型,在这些领域中,简单、快速地获取三维模型具有极其重要的意义.目前,人们主要通过3 种方式来获取三维模型:(1) 利用传统几何造型技术直接构造模型;…